Sensor fusion for positioning solutions
Enabling autonomy through sensor fusion.
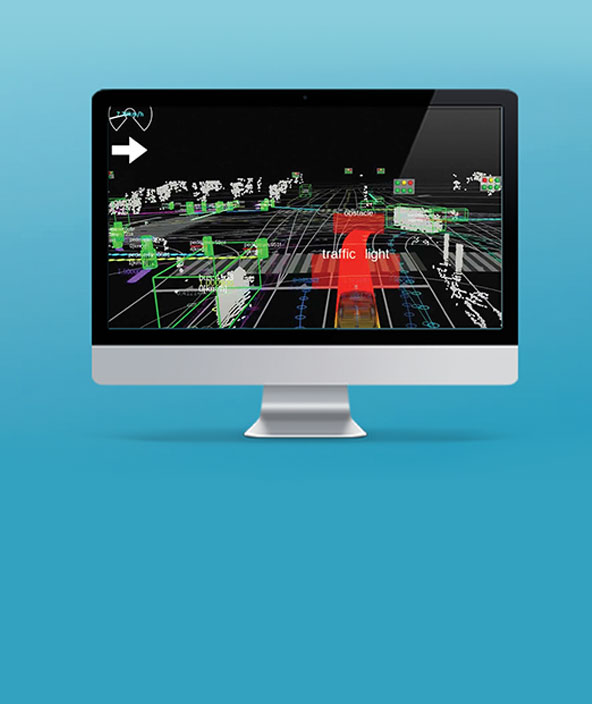
Automotive LiDAR Deployment
A demonstration of high-fidelity, real-time point clouds that support safe and autonomous driving applications.

Case studies in autonomy
See how companies, universities and governments are implementing autonomy through sensor fusion and ADAS.
What is sensor fusion?
In this video, we explain how sensor fusion works by looking at how inertial measurements enhance GNSS satellite positioning.
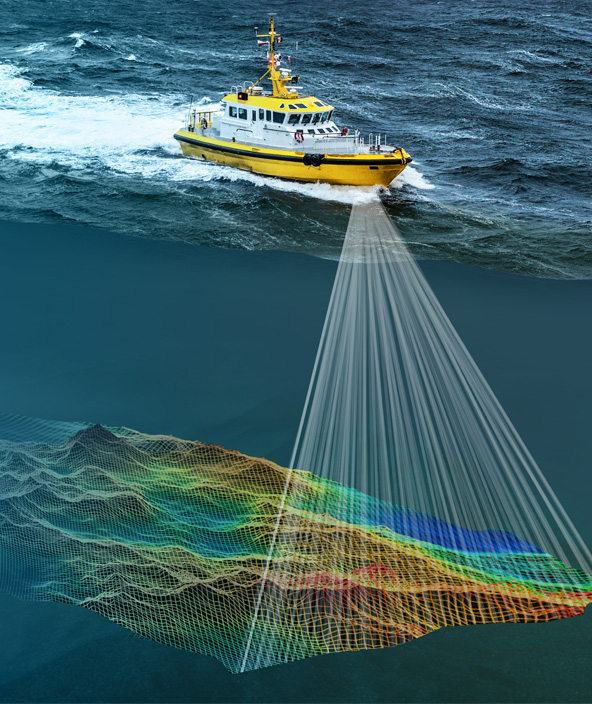
Sensor fusion, at its most basic level, is about combining different sensor measurements together, whether that be GNSS, inertial, photogrammetry, LiDAR/RADAR and others.
We'll explain how this is achieved and the ways it enables autonomous applications.
Overview
Why sensor fusion?
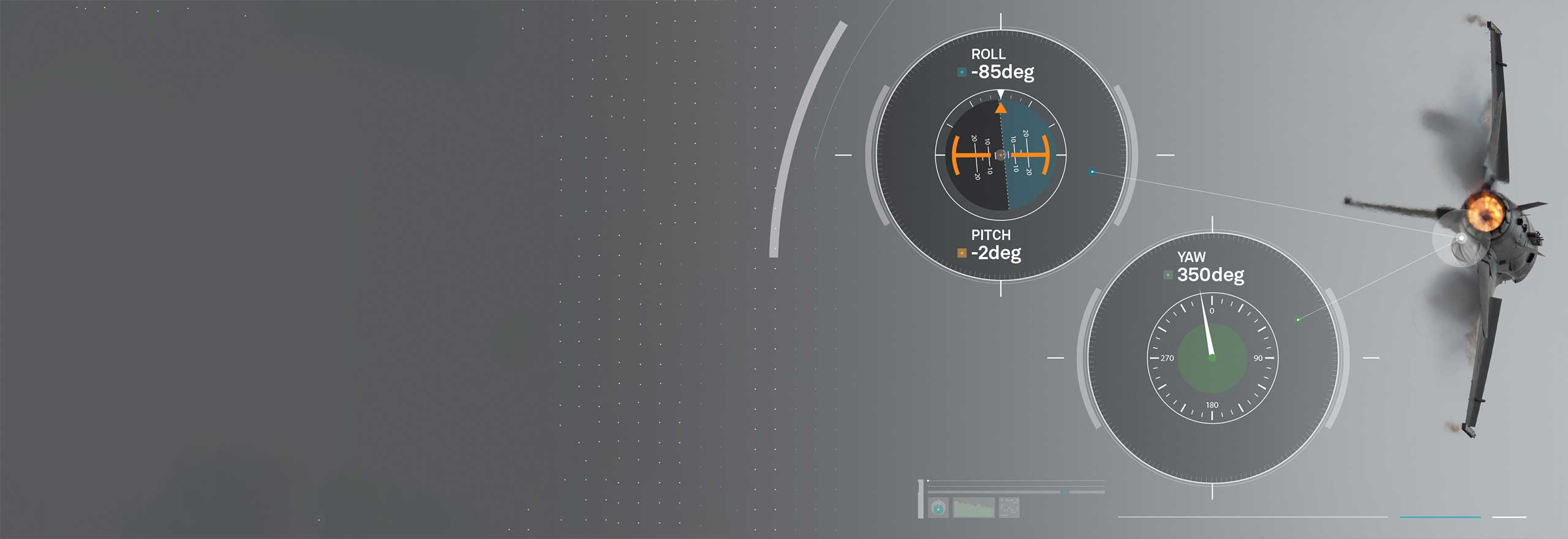
Sensor fusion involves the complicated process of using algorithms to fuse together measurements from many different sensors. The result is a more accurate, reliable and safe output position that we can use in autonomous applications.
For example, Global Navigation Satellite Systems (GNSS) like the Global Positioning System (GPS) provide measurements that can be used to determine a position on the Earth. Inertial measurements from an Inertial Measurement Unit (IMU) can be used to determine a platform's velocity, acceleration, and attitude – its heading, roll, and pitch. Perception sensors like photogrammetry, cameras, LiDAR and RADAR measure a platform's surroundings, and can be used to identify nearby objects or hazards, including road signs, pedestrians or objects to interact with.
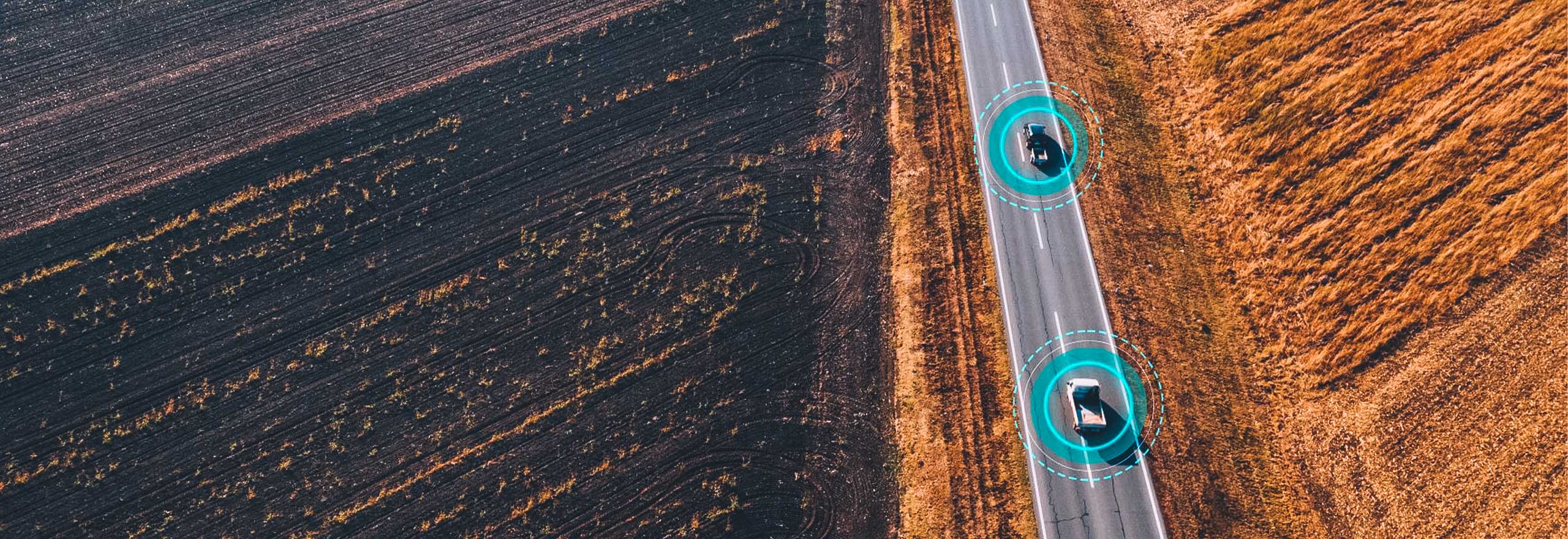
How does sensor fusion enable autonomy?
An autonomous system relies on sensor fusion to understand where it is in the world, what hazards are near, how should it interact with which objects and more. Without sensor fusion algorithms and the perception or positioning technologies supplying data, autonomous applications would not be possible.

Explore
$ProductName
$SustainabilityImpactLabel
$SustainabilityCTABandHeadingLabel
We’re climbing the automation curve
Our transition to Intelligent automation is accelerating. Ultimately, our innovations will give rise to new technologies and applications - many of which we’ve yet to imagine. Today, every Hexagon solution is mapped and tagged according to its level of automation, so customers can clearly track our progress towards the freedom of autonomy.

Land
Products that make an environmental impact in forest monitoring, material reusability, farming or water usage.

Air
Products that make an environmental impact in renewable energy, noise pollution elimination and e-mobility.

Water
Products that make an environmental impact in saving our oceans, reducing pollution and increasing access to clean water.