Fusão de sensor para soluções de posicionamento
Habilitando a autonomia por meio da fusão do sensor.
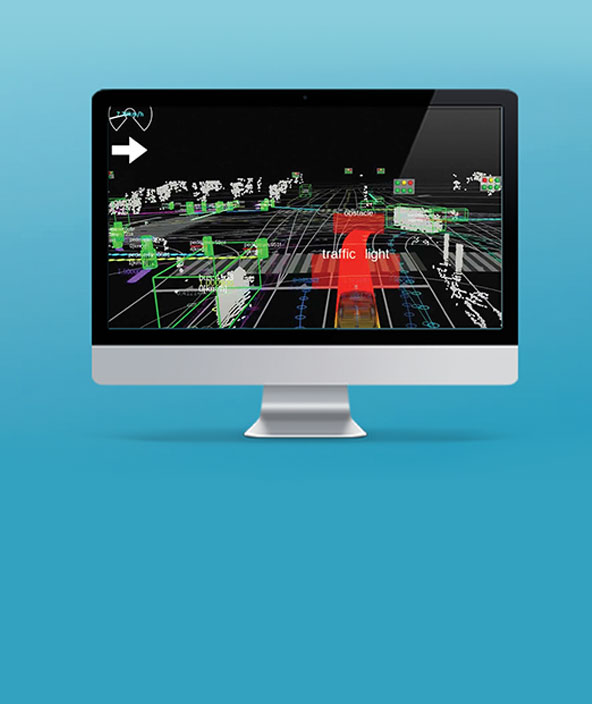
Implantação LiDAR automotiva
Uma demonstração de nuvens de pontos em tempo real de alta fidelidade que suportam aplicações de direção segura e autônoma.

Estudos de caso em autonomia
Veja como empresas, universidades e governos estão implementando a autonomia por meio da fusão de sensores e ADAS.
O que é fusão de sensores?
Neste vídeo, explicamos como a fusão de sensores funciona ao observar como as medições inerciais aprimoram o posicionamento GNSS por satélite.
A fusão de sensores, em seu nível mais básico, é a combinação de diferentes medições de sensores, sejam GNSS, inercial, fotogrametria, LiDAR/RADAR e outras.
Explicaremos como ela é obtida e como permite a realização de aplicações autônomas.
Visão geral
Por que a fusão de sensores?
A fusão de sensores envolve o complicado processo de uso de algoritmos para fundir medições de vários sensores diferentes. O resultado é uma posição de saída mais precisa, confiável e segura que podemos usar em aplicações autônomas.
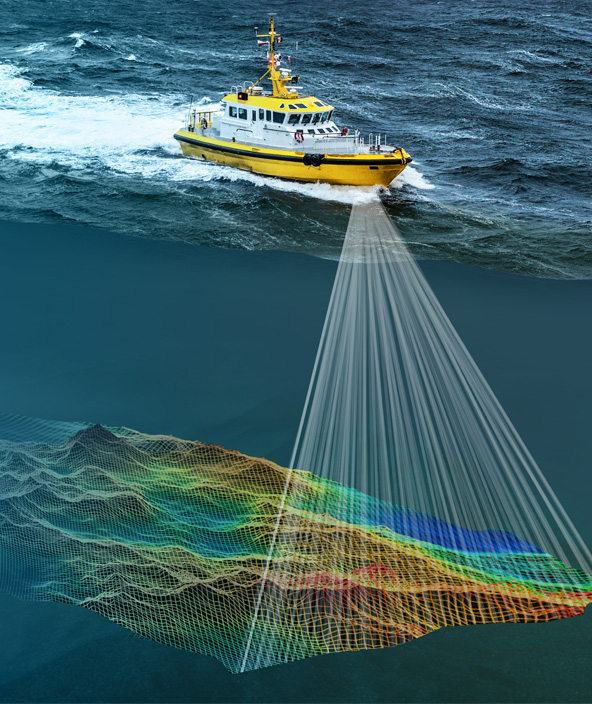
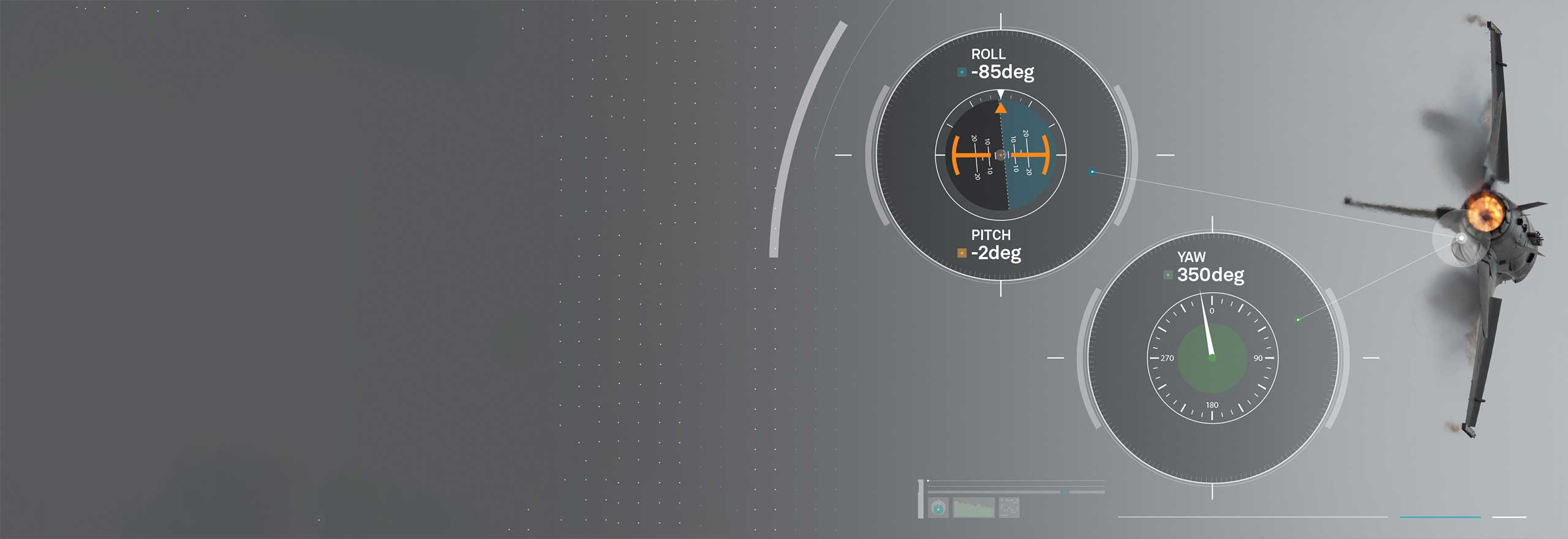
Um exemplo são os sistemas de navegação global por satélite (GNSS), como as de coordenadas GPS, que identificam onde estamos no mundo. As medições inerciais determinam nossa orientação no mundo – nosso rumo, atitude, velocidade e muito mais. Sensores de percepção como fotogrametria, câmeras, LiDAR e RADAR identificam objetos ou riscos próximos, incluindo placas de trânsito, pedestres ou objetos para interagir.
Como a fusão de sensores possibilita a autonomia?
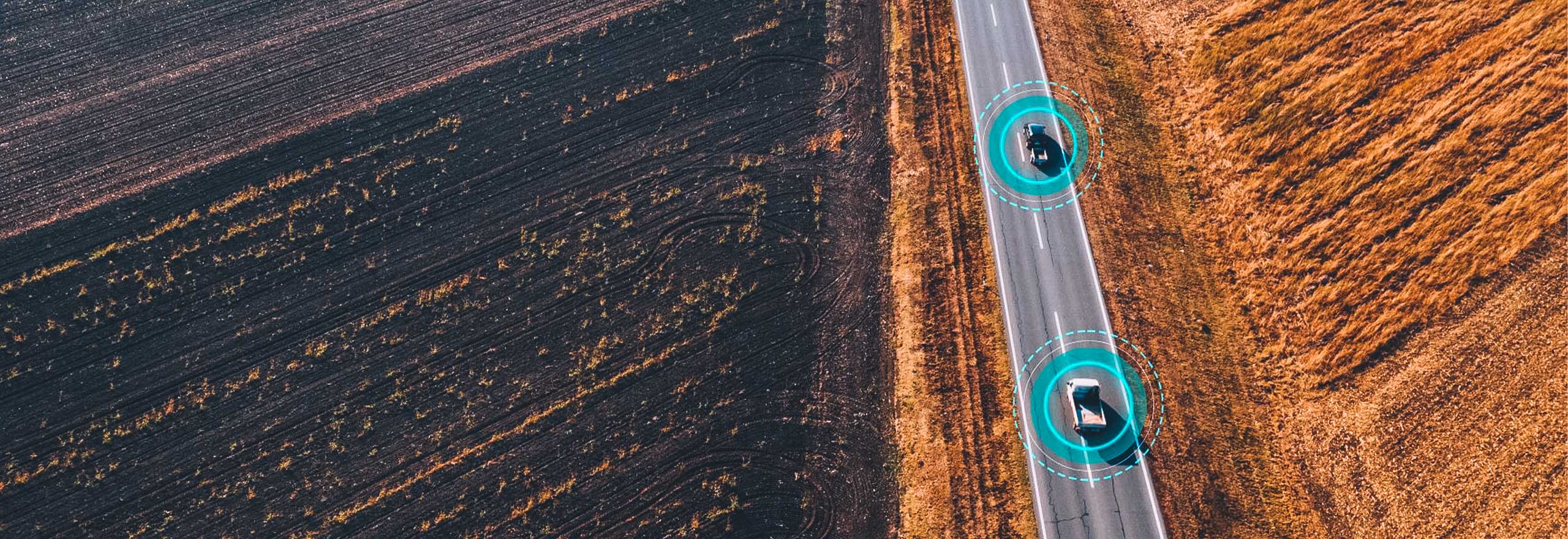
Um sistema autônomo depende da fusão de sensores para entender onde ele está no mundo, quais perigos estão próximos, como deve interagir com quais objetos e muito mais. Seria impossível desenvolver aplicações autônomas sem algoritmos de fusão de sensores e as tecnologias de percepção ou posicionamento que fornecem dados.

Explore
$ProductName
$SustainabilityImpactLabel
$SustainabilityCTABandHeadingLabel
Estamos escalando a curva da automação
Nossa transição para a automação inteligente está acelerando. Por fim, nossas inovações darão origem a novas tecnologias e aplicações – muitas das quais nem mesmo começamos a imaginar. Hoje, cada solução da Hexagon é mapeada e identificada de acordo com seu nível de automação, para que os clientes possam acompanhar claramente nosso progresso rumo à liberdade da autonomia.
-
Nível 0/Nenhum:
Um humano realiza todas as tarefas, nenhum dado é usado
-
Nível 1/Assistida por humanos:
Um humano é responsável por realizar tarefas, mas certas funções são automatizadas para simplificar o controle
-
Nível 2/Parcial:
Algumas tarefas são automatizadas para que a operação possa ser autônoma por curtos períodos (ou em circunstâncias específicas)
-
Nível 3/Condicional:
A operação autônoma é possível dentro de certos limites, mas a intervenção humana pode ser necessária em cima da hora
-
Nível 4/Alta:
Projetado para concluir tarefas necessárias de forma autônoma, mas pode exigir intervenção humana se as circunstâncias mudarem além dos limites específicos
-
Nível 5/Total:
Controla tarefas automatizadas sob todas as condições, mas o ser humano pode solicitar assumir o controle; pode concluir todas as tarefas esperadas sem intervenção humana

Terrenos
Produtos que causam impacto ambiental no monitoramento florestal, reutilização de materiais, agricultura ou uso de água.

Ar
Produtos que causam impacto ambiental em energia renovável, eliminação de poluição sonora e mobilidade elétrica.

Água
Produtos que causam um impacto ambiental no salvamento de nossos oceanos, reduzindo a poluição e aumentando o acesso à água limpa.