Fusión de sensores para soluciones de posicionamiento
Permite la autonomía mediante la fusión de sensores.
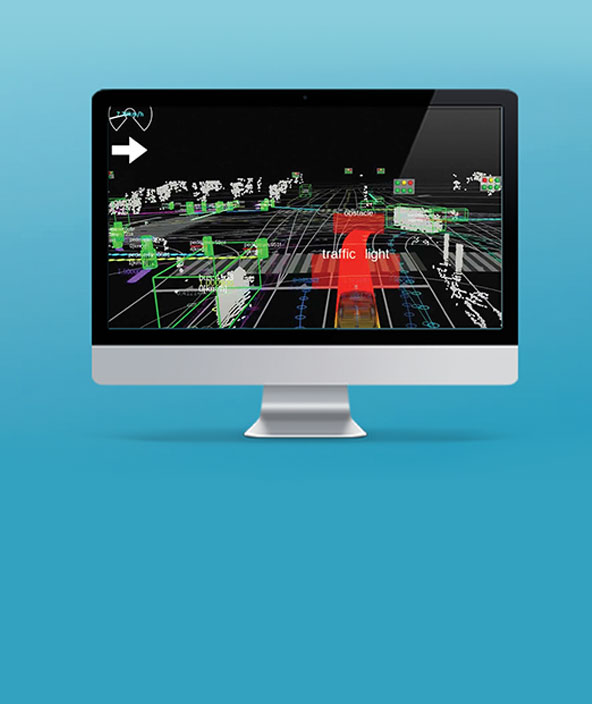
Implementación de LiDAR en la automoción
Una demostración de nubes de puntos en tiempo real y de alta fidelidad que son compatibles con aplicaciones de conducción segura y autónoma.

Casos prácticos de autonomía
Vea cómo empresas, universidades y gobiernos están implementando la autonomía a través de la fusión de sensores y ADAS.
¿Qué es la fusión de sensores?
En este vídeo, explicamos cómo funciona la fusión de sensores analizando cómo las mediciones inerciales mejoran el posicionamiento de los satélites GNSS.
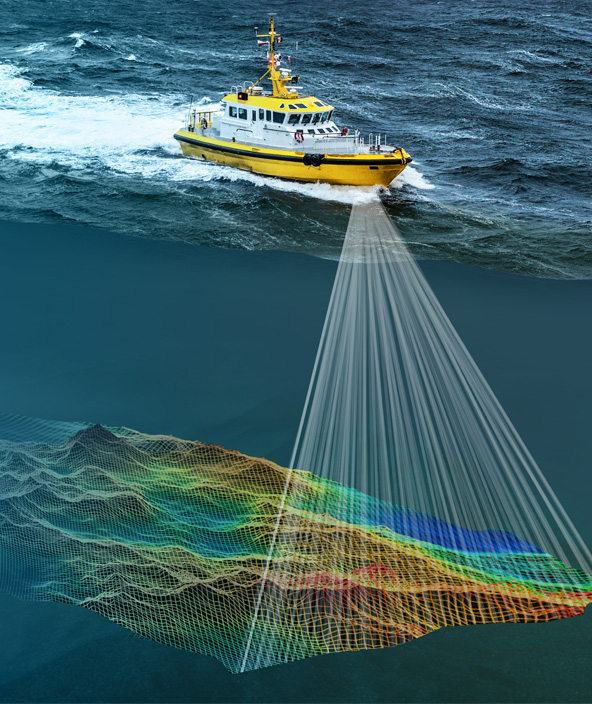
La fusión de sensores, en su nivel más básico, consiste en combinar diferentes mediciones de sensores, ya sea GNSS, inercial, fotogrametría y LiDAR/RADAR, entre otros.
Explicaremos cómo se logra y las formas en que habilita las aplicaciones autónomas.
Información general
¿Por qué la fusión de sensores?
La fusión de sensores implica el complicado proceso de utilizar algoritmos para fusionar mediciones de muchos sensores diferentes. El resultado es una posición de salida más precisa, fiable y segura que podemos utilizar en aplicaciones autónomas.
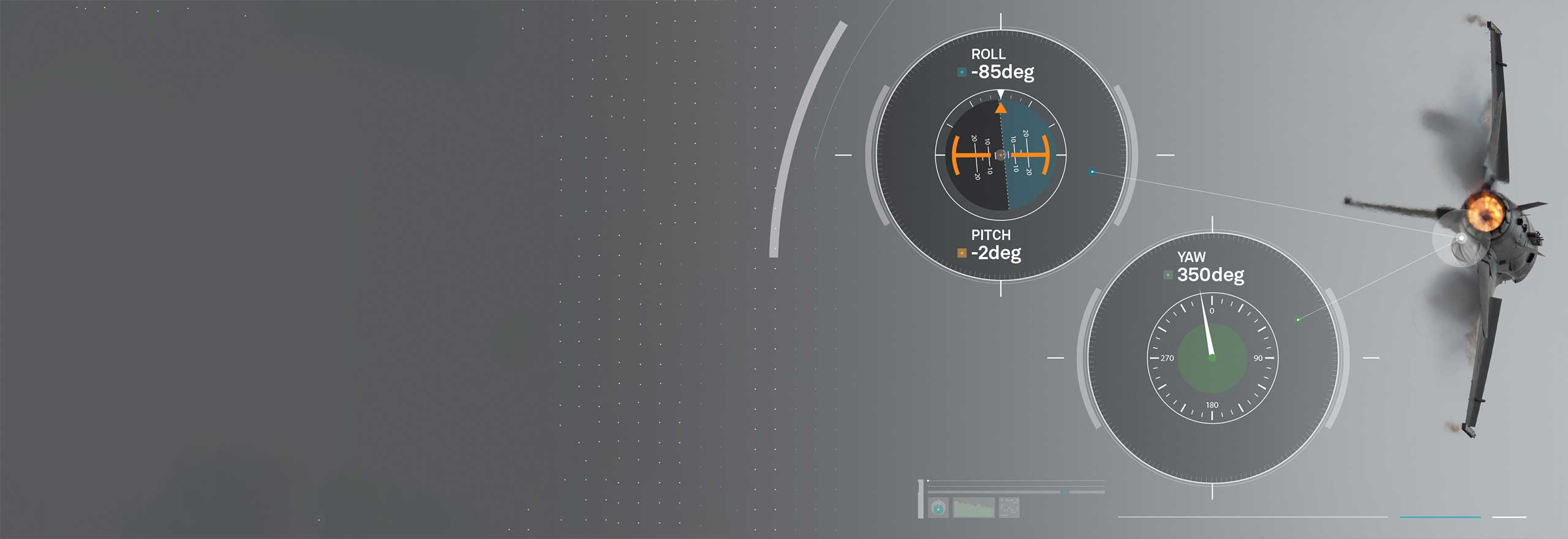
Por ejemplo, los sistemas de navegación global por satélite (GNSS) como las coordenadas GPS identifican en qué parte del mundo nos encontramos. Las mediciones inerciales determinan nuestra orientación en el mundo: nuestra dirección, actitud, velocidad y mucho más. Los sensores de percepción, como la fotogrametría, las cámaras, LiDAR y RADAR, identifican los objetos o peligros cercanos, incluidas las señales de tráfico, los peatones o los objetos con los que interactuar.
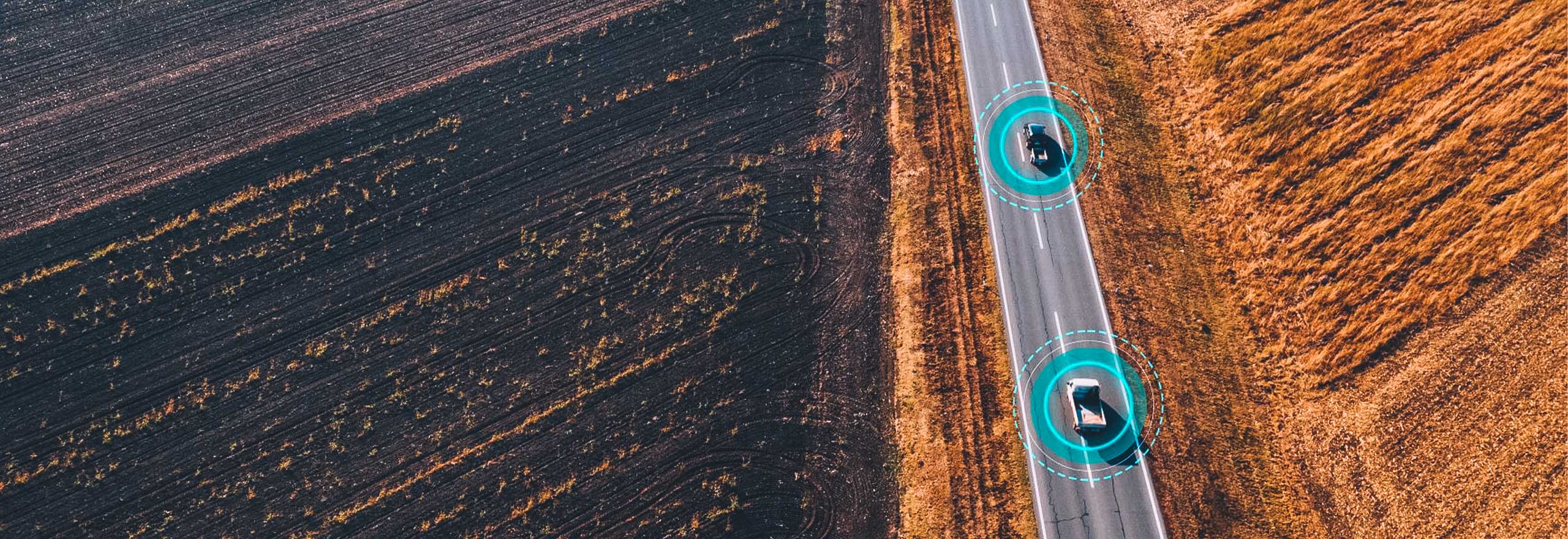
¿Cómo permite la autonomía la fusión de sensores?
Un sistema autónomo se basa en la fusión de sensores para comprender dónde se encuentra en el mundo, qué peligros están cerca, cómo debe interactuar con qué objetos y más. Sin los algoritmos de fusión de sensores y las tecnologías de percepción o posicionamiento que suministran datos, las aplicaciones autónomas no serían posibles.

Explorar
$ProductName
$SustainabilityImpactLabel
$SustainabilityCTABandHeadingLabel
Incrementamos la curva de la automatización
Nuestra transición hacia la automatización inteligente se está acelerando. A la larga, nuestras innovaciones darán lugar a nuevas tecnologías y aplicaciones, muchas de las cuales aún están por descubrir. Hoy en día, cada solución de Hexagon se mapea y etiqueta según su nivel de automatización, por lo que los clientes pueden hacer un seguimiento claro de nuestro progreso hacia la libertad que proporciona la autonomía.
-
Nivel 0/Ninguno:
El ser humano realiza todas las tareas, no se utilizan datos
-
Nivel 1/Asistencia humana:
El ser humano se encarga de realizar las tareas, pero algunas funciones están automatizadas para simplificar el control
-
Nivel 2/Parcial:
Algunas tareas están automatizadas para que el funcionamiento pueda ser autónomo durante períodos cortos (o en circunstancias específicas)
-
Nivel 3/Condicional:
El funcionamiento autónomo es posible dentro de ciertos límites, pero la intervención humana puede ser necesaria con poca antelación
-
Nivel 4/Alto:
Diseñado para completar las tareas requeridas de forma autónoma, pero puede requerir intervención humana si las circunstancias cambian más allá de límites específicos
-
Nivel 5/Completo:
Tareas de control automatizadas en todas las condiciones, pero el ser humano puede solicitar hacerse cargo; puede completar todas las tareas requeridas sin intervención humana

Tierra
Productos que tienen un impacto medioambiental en el control forestal, la reutilización de materiales, la agricultura o el uso del agua.

Ventilación
Productos que tienen un impacto medioambiental en las energías renovables, la eliminación de la contaminación acústica y la electromovilidad.

Agua
Productos que tienen un impacto ambiental en la conservación de nuestros océanos, la reducción de la contaminación y el aumento del acceso a agua limpia.