Virtual Test Drive
Complete tool-chain for driving simulation applications
Ready to learn more?
VTD is our toolkit for the creation, configuration, presentation and evaluation of virtual environments in the scope of road and rail based simulations. It is used for the development of ADAS and automated driving systems as well as the core for training simulators. It covers the full range from the generation of 3d content to the simulation of complex traffic scenarios and, finally, to the simulation of either simplified or physically driven sensors. It is used in SiL, DiL, ViL and HiL applications and may also be operated as co-simulations including 3rd party or custom packages. By its open and modular design it can easily be interfaced and integrated.
Creation of Virtual Worlds
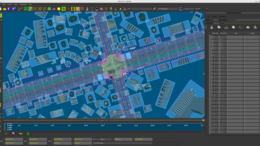
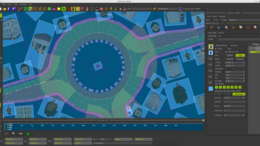
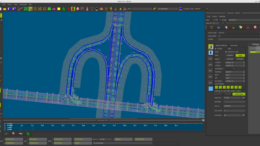
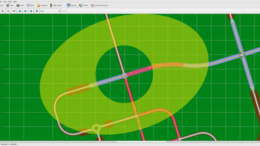
Our interactive Road Network Editor (ROD) allows to design road and rail networks in full detail with unlimited numbers of lanes, complex intersections, comprehensive signs and signaling. It links and exports logic and graphic data consistently from a single source.
Virtual worlds can be designed from scratch or compiled from existing database tiles. Various import and export formats as well as large libraries of 3D models and country specific signs/signals accelerate the creation process.
All logics data is exported compliant to the OpenDRIVE® format. OpenCRG® data can be linked to a database. The export of the graphics data may be customized.
Configuration of Virtual Worlds
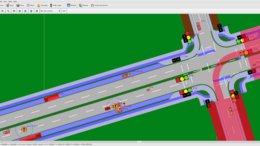
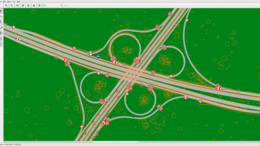
Dynamic content is defined with our interactive scenario editor. It visualizes the underlying OpenDRIVE® database and allows the user to specify traffic as individual objects and as autonomous swarms around key entities. Both, left- and right-hand driving environments are supported. Our large library of vehicles, pedestrians and driver properties may easily be customized. With a few mouse clicks, the user may define paths for individual entities, configure signal control programs, place objects and add events from a large set of actions.
Real-time monitoring and command injection is supported during the simulation phase. Native support for OpenSCENARIO has been available since 2018.
Simulations of Virtual Worlds
No matter what environment you are running in (XiL), what your time-base looks like (real-time or non real-time) or which additional components are involved (co-simulations) – VTD will seamlessly adapt. At any time, the user may take full control over the execution of the simulation, specify varying time steps and consume object, image and sensor data via a whole range of interfaces (network, shared memory etc.). Any number of externally computed entities may be injected and multiple installations may either run in parallel or inter-connected. VTD may be operated from a single computer up to a full-scale HPC environment.






Customization of Virtual Worlds
VTD is an out-of-the-box solution but doesn’t stick to this box. The user may customize VTD on various levels. We provide SDKs along with ready-to-go templates for sensor simulation (object-list based and physics based), dynamics simulation and image generation. Our open interfaces for run-time data and simulation control make it easy to integrate VTD in any environment. VTD runs on Linux systems and is – by its extensive use of network interfaces – not only modular but also extremely scalable.




Case Studies: Virtual Test Drive
