Virtual Test Drive
Виртуальные испытания ADAS систем и автопилота транспортных средств в дорожной обстановке
Ready to learn more?
VTD - программный комплекс для проведения испытаний, отладки и анализа работы автопилота и систем помощи водителю - ассистентов вождения или ADAS систем - в виртуальной среде, которая может являться точной копией реальной локации или произвольной дорожной сетью с городской или загородной инфраструктурой, регулируемым траффиком, учётом правил дорожного движения, погодными условиями и временем суток. А также для создания виртуальной среды анализа и формирования требований при выборе типов датчиков автоматических систем транспортного средства, их количества, мест установки, принципов взаимодействия, их работы при всевозможных отказах, помехах.
Содание виртуальных миров
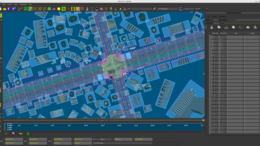
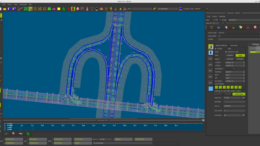
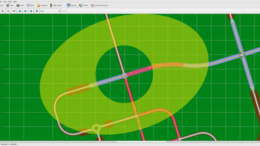
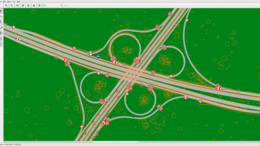
С помощью графической среды Road Designer (ROD), которая входит в состав VTD, создаётся дорожная инфраструктура в формате OpenDRIVE® (лидирующий открытый формат и де-факто стандарт для описания разветвлённой дорожной сети), её трёхмерная модель, наполнение второстепенными объектами: зданиями, сооружениями, дорожными знаками, светофорами. Возможен импорт данных в форматах ASCII (GPS-данные, DXF, кривые и прочие форматы).
ROD имеет обширные библиотеки типовых элементов дорожных объектов (прямые, перекрёстки, инфраструктура, знаки и т.п.), элементы загородных шоссе, модели реальных дорожных развязок, готовые модели локаций (целые городские кварталы, подъездные и загородные дороги). Встроенные средства предоставляют возможность наполнять библиотеку пользовательскими элементами: знаками, разметкой, особенностями микро профиля дорожного покрытия в формате OpenCRG®, зданиями и прочим, что позволяет построить виртуальную окружающую среду максимально повторяющую реальную местность.
Динамика виртуальных миров
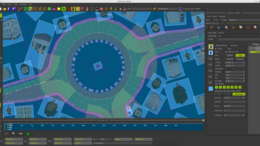
Динамическое наполнение для виртуальной среды формируется с помощью сценариев: подвижные объекты, участники дорожного движения, светофоры. За эти возможности в VTD отвечает редактор сценариев Traffic/Scenario Editor.
Сценарием закладывается характер поведения исследуемого транспортного средства и других участников — автомобилей-соседей, пешеходов. Модель поведения для водителя может быть полностью пользовательская или может быть выбрана из встроенной библиотеки характеров: агрессивный, обычный, неопытный водитель, соблюдение/несоблюдение ПДД. Предусмотрена возможность создавать пользовательскую модель водителя на основе имеющихся характеров, отрегулировав интересующие параметры: выбрать или построить свою кривую скоростей вхождения в поворот в зависимости от его радиуса, указать уровень ускорений при разгоне и торможении, процент превышения разрешённой максимальной скорости движения, дистанцию при движении, совершать ли обгон, какое время находиться в полосе движения, за какое время до манёвра менять полосу движения на нужную и многое другое. Для других участников дорожного движения также может быть назначен характер водителя, один на всех/группу или индивидуальный характер. Сценарий формируется в открытом формате OpenSCENARIO® .
Моделирование и анализ поведения виртуальных миров
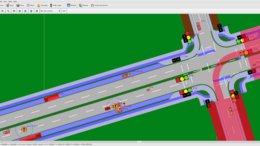
Независимо от того, каким образом планируется внедрять VTD в процесс разработки (Software in the loop, Hardware in the loop – программное, аппаратное взаимодействие и т.д.), в каком масштабе времени – реальном или в «оффлайн», какие дополнительные компоненты задействованы (многодисциплинарный анализ) – VTD легко адаптируется. В любое время пользователь имеет полный контроль над виртуальной средой и моделью, в графическом режиме или с помощью командной строки.
Графичесикй режим обеспечивается модулем ImageGenerator — генератор визуального контента. Он отвечает за визуализацию и анимацию всех участников движения, фар, отражений, теней, неровностей на дороге, базовых параметров погоды (частицы — дождь, снег), газона, ветрового стекла и щёток стеклоочистителя. Предусмотрена генерация видеопотока в формате реального или логического времени. ImageGenerator позволяет реализовать высокоточный графический рендеринг: тональную компрессию, эффекты искажения изображения, множественные источники света (фонари, автомобили и пр.), световую «маску» для генерации изображений «на лету» (эффект рыбьего глаза, хроматические аберрации и многие другие особенности оптических систем) с многопроцессорной обработкой для получения 32 битных изображений. Возможен рендеринг «упрощённых» инфракрасных изображений на основе базы данных для обычного визуального рендеринга, а так же детальной модели инфракрасных сенсоров используя технику трассировки лучей. И другие типы визуализации.






Приспособление среды разработки к требованиям заказчика
VTD – это готовое решение, но с модульной структурой и широкими возможностями адаптации к потребностям заказчиков.
В программном комплексе VTD предусмотрен комплект разработчика ПО, реализован доступ к API функциям и библиотекам для разработки пользовательских дополнений (плагинов). Доступны примеры моделей сенсоров, базовая динамическая модель транспортных средств и интерфейс для взаимодействия с детальной моделью из системы Adams® , примеры функций для программ MATLAB®и ADTF, модуль работы со звуками и другие расширенные возможности. VTD работает в системе Linux и благодаря широкому использованию сетевых интерфейсов является не только модульным, но и чрезвычайно масштабируемым решением.



-
Записи вебинаров

Case Studies: Virtual Test Drive
