VTD (Virtual Test Drive)
시뮬레이션 어플리케이션 구동을 위한 완벽한 툴 체인
Ready to learn more?
가상 테스트 드라이브는 도로 및 철도 기반 시뮬레이션의 범위에서 가상 환경을 생성, 구성, 표시 및 평가하기 위한 툴킷입니다. 훈련 시뮬레이터의 핵심뿐만 아니라 ADAS 및 자동 운전 시스템의 개발에 사용됩니다. 3D 컨텐츠 생성에서 복잡한 트래픽 시나리오의 시뮬레이션까지, 그리고 마지막으로 단순화된 센서 또는 물리적으로 구동되는 센서의 시뮬레이션까지 모든 범위를 포괄합니다. SiL, DiL, ViL 및 HiL 응용 프로그램에 사용되며 타사 또는 사용자 정의 패키지를 포함한 공동 시뮬레이션으로도 작동할 수 있습니다. 개방형 및 모듈식 설계로 쉽게 인터페이스 및 통합할 수 있습니다.
가상 세계의 창조
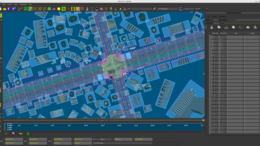
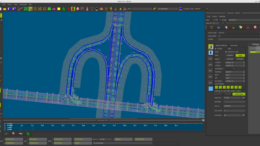
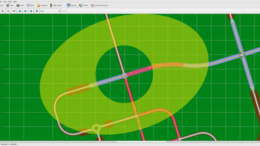
VTD의 대화형 로드 네트워크 에디터(ROD) 툴을 이용해 복잡한 차선, 교차로, 종합 표지판 및 신호로 도로 및 철도 네트워크를 자세히 설계할 수 있습니다. 단일 소스에서 로직 및 그래픽 데이터를 일관되게 연결하고 내보낼 수 있습니다.
가상 세계는 처음부터 새롭게 설계하거나 기존 데이터베이스 타일에서 컴파일할 수 있습니다. 가져오기 및 내보내기 등의 다양한 형식 뿐만 아니라, 3D 모델의 대형 라이브러리가 제공되며 국가별 표지판고 신호등의 생성 프로세스를 가속화할 수 있습니다.
모든 로직 데이터는 OpenDRIVE® 형식을 준수하여 내보냅니다. OpenCRG® 데이터는 데이터베이스에 연결될 수 있습니다. 그래픽 데이터의 내보내기는 사용자 정의를 할 수 있습니다.
가상 세계의 구성
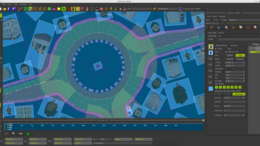
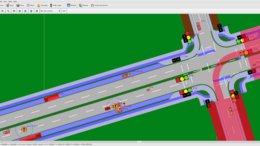
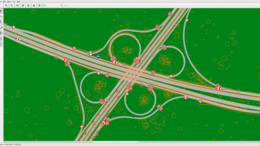
다이나믹 컨텐츠는 대화식 시나리오 편집기를 사용하여 정의됩니다. 기본 OpenDRIVE® 데이터베이스를 시각화하고 사용자가 개별 개체 및 주요 엔티티 주변의 자율차량의 트래픽을 지정할 수 있습니다.왼손잡이와 오른손잡이의 운전 환경이 모두 지원됩니다. 대형 차량, 보행자 및 운전자 속성 라이브러리를 통해 쉽게 사용자 정의가 가능합니다. 몇 번의 마우스 클릭만으로 사용자는 개별 엔터티에 대한 경로를 정의하고, 신호 제어 프로그램을 구성하고, 개체를 배치하고, 대규모 작업에서의 이벤트를 추가할 수 있습니다.
시뮬레이션 단계에서 실시간 모니터링 및 명령어 삽입이 지원됩니다. OpenSCENARIO에 대한 기본 지원은 2018년부터 제공되었습니다.
가상 세계의 시뮬레이션
(XiL)에서 실행중인 환경, (실시간 또는 비 실시간)으로 보이는 모양 또는 (Co-Simulation, 연계해석)과 관련된 추가 구성 요소에 관계없이 VTD는 완벽하게 적응합니다. 사용자는 언제든지 시뮬레이션 실행을 완벽하게 제어하할 수 있으며 다양한 시간 단계를 지정하며 모든 범위의 인터페이스 (네트워크, 공유 메모리 등)를 통해 객체, 이미지 및 센서 데이터를 사용할 수 있습니다. 외부에서 계산된 엔티티는 얼마든지 삽입할 수 있으며 여러 설치가 병렬로 또는 상호 연결될 수 있습니다. VTD는 단일 컴퓨터에서 최대 규모의 HPC 환경까지 운영할 수 있습니다.






가상 세계의 커스터마이징
VTD는 독창적인 솔루션으로 사용자의 필요에 따라 매우 가변적입니다. 사용자는 VTD를 다양한 레벨에서 사용자 정의할 수 있습니다. 센서 시뮬레이션(객체 목록 기반 및 물리 기반), 다이나믹 시뮬레이션 및 이미지 생성을 위해 바로 사용할 수 있는 템플릿과 함께 SDK를 제공합니다. 런타임 데이터 및 시뮬레이션 제어를 위한 개방형 인터페이스를 통해 모든 환경에서 VTD를 쉽게 통합할 수 있습니다. VTD는 Linux 시스템에서 실행되며 광범위한 네트워크 인터페이스를 사용한 모듈로서의 장점이 있을 뿐만 아니라 확장성이 뛰어납니다.




Case Studies: Virtual Test Drive
