Hexagon/Adams 社と MATLAB/Simulink 社による、照射黒鉛ブロックの取り扱いのための革新的な真空グリッピングシステムの研究のためのリアルタイムコントローラの開発
Riccardo Chebac、Fabio Vanoni、Alessandro Porta、Fabrizio Campi、ミラノ工科大学エネルギー学部原子力工学科
Engineering Reality 2024 年1号
スマートマニュファクチャリングの加速
グラファイトは、原子力産業でモデレーターとプリズムの両方として広く使用されてきました。その使用は、ピーチボトム高温ガス冷却リアクター(HTGR)、超高温リアクター実験(UHTREX)、溶融塩リアクター実験(MSRE)などのさまざまな実験リアクターファミリー、および KIWI やロケット車両用原子力発電機(NERVA)などの原子力発電機、ならびに非酸化マグネシウム(MAGNOX)、ボルシュー・モシュノスティ・カナニー(RBMK)、高度ガス冷却リアクター(AGR)などの商用リアクタータイプが挙げられます。
より優れた減速性能を持つ材料もありますが、黒鉛は非酸化性環境において不活性であること、高温耐性があること、そして製造・加工技術が確立されていることから、原子力産業では旧式炉から新型炉まで幅広く使用されています。この材料の主な課題は、照射後およびこれらのプラントの廃止措置中に発生します。主な障害は、廃棄物量、長寿命放射性核化合物の存在、ウィンガーエネルギー、グラファイト脆化です。これにより、廃棄コストが 5 倍高くなり、光水リアクター(LWR)と比較して 1 MWh あたりの廃棄物量が 10 倍増加します。
これらの課題により、この技術による廃炉プロジェクトは、成功の程度に差はあれ、以下のわずか4件しか完了していません:フォート・セント・ブレイン、ウィンズケールの先進ガス冷却炉、グリープ炉、ブルックヘブン国立研究所の研究炉。これらの理由から、この技術の廃止措置プロセスには多くの改善の余地があります。この目的のために、H2020 Inno4graph のようなヨーロッパのプロジェクトが作成されました。最適化の観点から、デジタルツインのコンセプトは原子力産業で広がっています。発電所の分野で言えば、デジタルツインは、プラントとシステム全体の個々のコンポーネントをモデリングするために使用される物理学と分析アプローチに基づく組み合わせた方法として見ることができます。これは、新規プラントと旧プラントの両方に適用できます。
これらのシステムは、さまざまなプラント寿命段階における運転限界の分析と提供を可能にします。特に、グラファイト主導のリアクターの廃止には、危険な活動や不確実性を伴う複雑なプロジェクトが含まれます。多くの原子力構造物はデジタル時代以前に建設されたため、文書は古く、不完全です。この課題に取り組むには、受け継いだ原子力資産を安全かつ効果的に廃止措置するためのさまざまなスキルと新しいアプローチが必要です。この点に関して、デジタルツイン技術は、オペレーターがタスクをより正確かつ測定可能に理解するのに大きく役立ちます。
このことを考慮して、この研究では、HexagonのADAMSマルチボディダイナミクスソフトウェアで開発されたMAGNOXリアクターのデジタルツインの最初の反復を紹介します。革新的な真空ベースのグリッピングシステムを使用したグラファイトブロックの持ち上げと取り扱いの可能性を調査します。ロボットのモデルは、モーションプロファイルと Simulink と ADAMS の間のリアルタイムコントローラーの両方を使用します。コントローラは、システムの機械的・物理的情報を入力として使用し、可能なブロック除去シナリオに対するリアルタイムの応答を提供します。
リアルタイムコントローラと組み合わせたシミュレータは、オペレータによる廃止措置プロセスの監督が必要なシナリオの研究に効果的で有望であることが証明され、グラファイト主導のリアクタコア全体の廃止措置に関する意思決定プロセスを支援する可能性があります。
方法
コンポーネントと作業環境
ADAMS ビューでリフティング能力を研究するために使用される CAD モデルを図 1 に示します。グラファイトブロック(図 1(a))では、ラチナリアクターで使用される PGA グラファイトの幾何学的特性と物理的特性の詳細なモデルを使用し、重量は 57.4 kg でした。エンドエフェクターについては、真空システムのリフティング能力を研究するために、簡略化したモデル(図1(b))を示しています。2つの真空グリッパーシステムは、システムの中心軸に対して放射状に並進制約で接続され、互いに正反対に配置されています。真空システムに不具合が生じた場合の追加保護レイヤーとして、一連の二次アームが追加されました。
使用するコンピュータは Dell XPS 15 9570 で 16 GB の RAM、 Intel Core i7-8750H CPU、専用の Nvidia GeForce GTX 1050 Ti グラフィックカード、および Microsoft Windows 10 オペレーティング システムです。図 2 のシミュレーション環境は、マグノックスリアクターコアの廃止措置中に発生した現実的なシナリオを示しています。
ブロックとリフティングシステムは中央に配置され、並進制約で拘束されています。この選択により、運転中のブロックセンタリングを心配することなく、システムの下降と持ち上げ、および必要な真空システムシーリング能力を研究することができます。
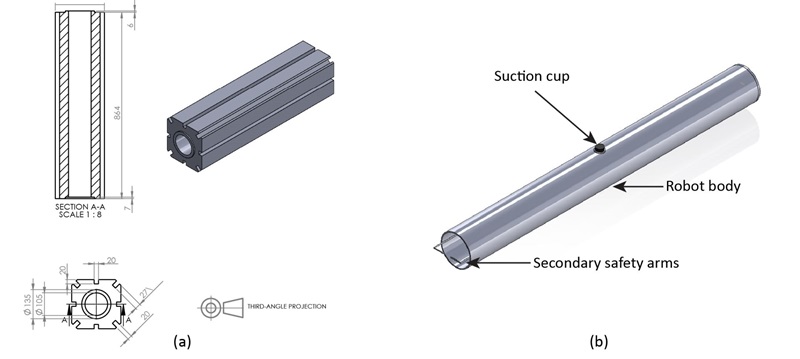
図1 (a)ラティーナ八角形グラファイトブロックのCADモデル、(b)ADAMSで使用されている真空システムのCADモデル。
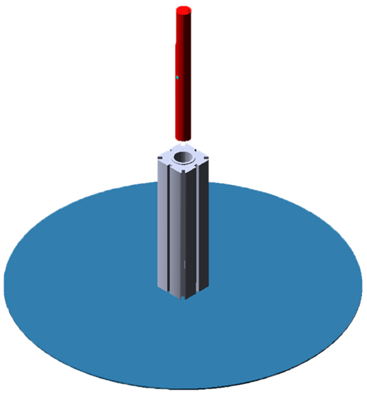
図 2。グラファイトブロックとロボットシステムを含むADAMSシミュレーション環境。
昇降システムコントローラ
PD(比例導関数)コントローラは、重量力がシステムに与える影響を考慮してシミュリンクで設計されました。これにより、振動を低減しながら、システムの新しい安定状態にすばやく到達することができます。このタイプの管理は、重力の影響を受ける次のすべてのコンポーネントに使用されました。ロボットの垂直位置、吸引カップの半径方向の並進運動、および二次アームの垂直運動。
二次アームの回転には、補償器を追加しないPDコントローラが使用されました。図 3 はコントローラを示し、オレンジ色のブロックは ADAMS 環境への接続を示しています。表 1 は、開発された様々な管理システムに対する比例及び微分利得値を示しています。
|
管理 |
コントロールされた変数 |
Kp |
Kd |
|
サクションカップの移動 |
軸中心からのサクションカップ距離 |
0.5 |
0.05 |
|
ロボット垂直移動 |
ロボットから地面までの距離 |
2.5 |
0.5 |
|
セカンダリアーム垂直移動 |
ロボット上部プレートからのアーム距離 |
0.5 |
0.01 |
|
セカンダリーアーム回転 |
アーム軸に対する回転 |
0.000025 |
0.00009 |
表 1。さまざまな管理変数に使用される比例および微分ゲイン値。
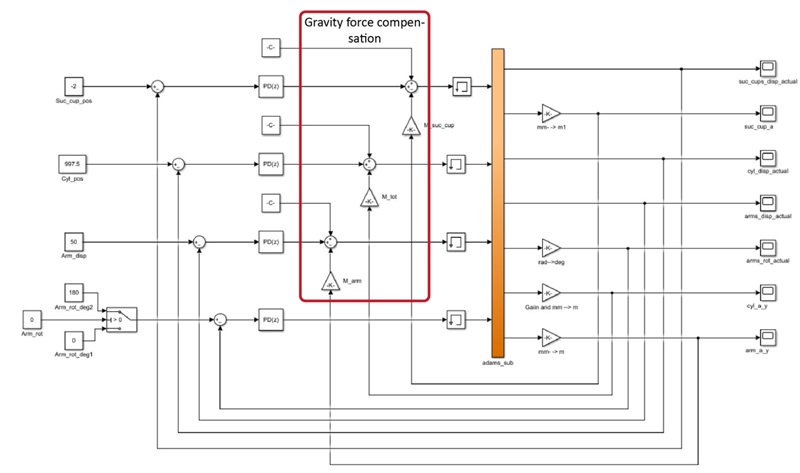
図 3。吊上げシステムに使用される Simulink コントローラのブロック図。
リアルタイム管理
外部ジョイスティックを使用してコントローラーの入力データを変更し、リアルタイム管理システムを開発する作業が行われました。一般的に、結果セクションに示すように、コントローラーはモーションカーブを入力として受け入れるか、またはモデルを開始する前に MATLAB と Simulink に 2 つのアドオンを追加して値を設定します。Simulink デスクトップリアルタイムと Vrjoystick により、外部ジョイスティックによる管理を可能にするアルゴリズムを開発することができました。
したがって、ジョイスティックはコントローラーを変更するのではなく、図 4 に要約されているように入力パラメーターのみを変更します。その後、コントローラは ADAMS モデルの更新を続行します。軸とボタンの値は、使用している特定のコントローラによって異なります。
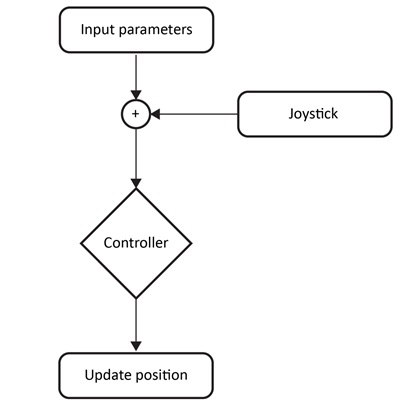
図 4 。ジョイスティックとコントローラシステムのフローチャート。
この例のパラメータは Sony PlayStation 4 コントローラ用です。PS4 コントローラは USB 経由で Windows ノートパソコンに接続する必要があります。この場合、直ちにコントローラとして認識され、追加のステップは必要ありません。コードは、開始前にコントローラが接続されているかどうかを確認します。結果が負の場合は、シミュレーションが停止します。シミュレーションは無期限に実行するように設計されています。
次の2 つのモードがあります:バッチおよびインタラクティブ。バッチモードでは、シミュレーションは Simulink 内でのみ実行されます。つまり、位置、回転などのみです。プロットが提供され、更新されます。インタラクティブモードでは、ADAMS ビューアが開き、3D 環境が表示され、コントローラ入力でリアルタイムに更新されます。
結果
以下に 2 つのケーススタディを紹介します。1 つ目は、リアクターの廃止措置中にグラファイトブロックを持ち上げるための現実的なアプローチを示すように設計された運動曲線を使用します。2 つ目は、コントローラがリアルタイムで動作していることを示します。
ケーススタディ1:モーションカーブによる管理
図 5 および図 6 は、吊り上げプロセスの例を示しています。手順は、以下のようになります。
- グラファイトブロックのチャネル内のロボットの降下
- 吸引カップの膨張、黒鉛の内壁との接触、真空システムの点火
- 地上高でのわずかな初期リフト
- 補助アームの下降と外側への回転
- グラファイトブロックのベースにセカンダリアームを掛けて固定
- 最終リフティング
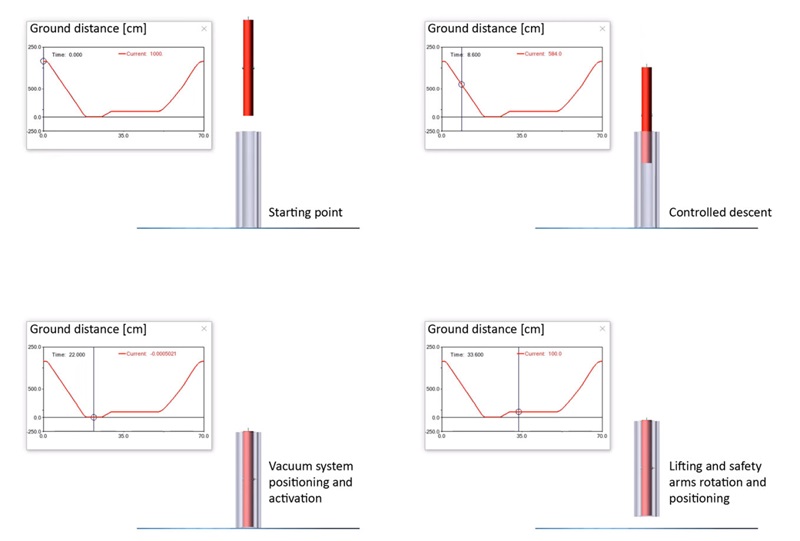
図 5。真空システムを使用したグラファイトブロック抽出の運動曲線例。
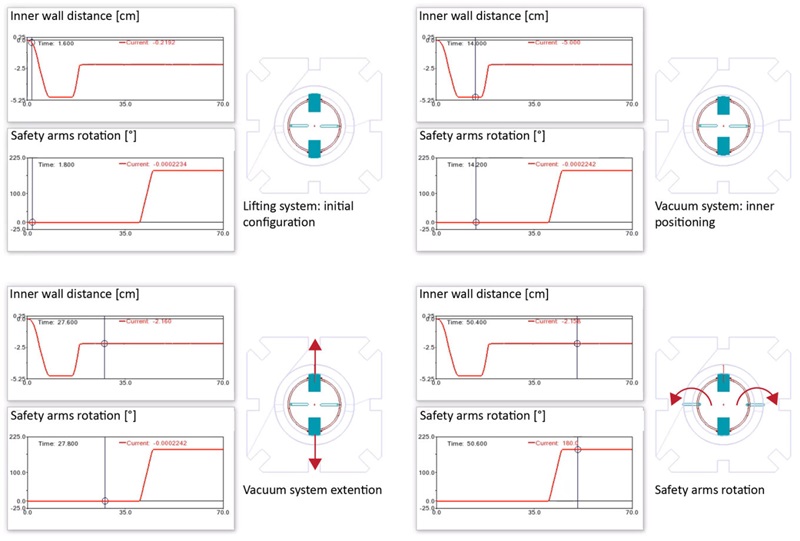
図 6。グラファイト抽出手順中のサクションカップと安全アームの運転の運動曲線例。
ケーススタディ2:ジョイスティックによるリアルタイム管理
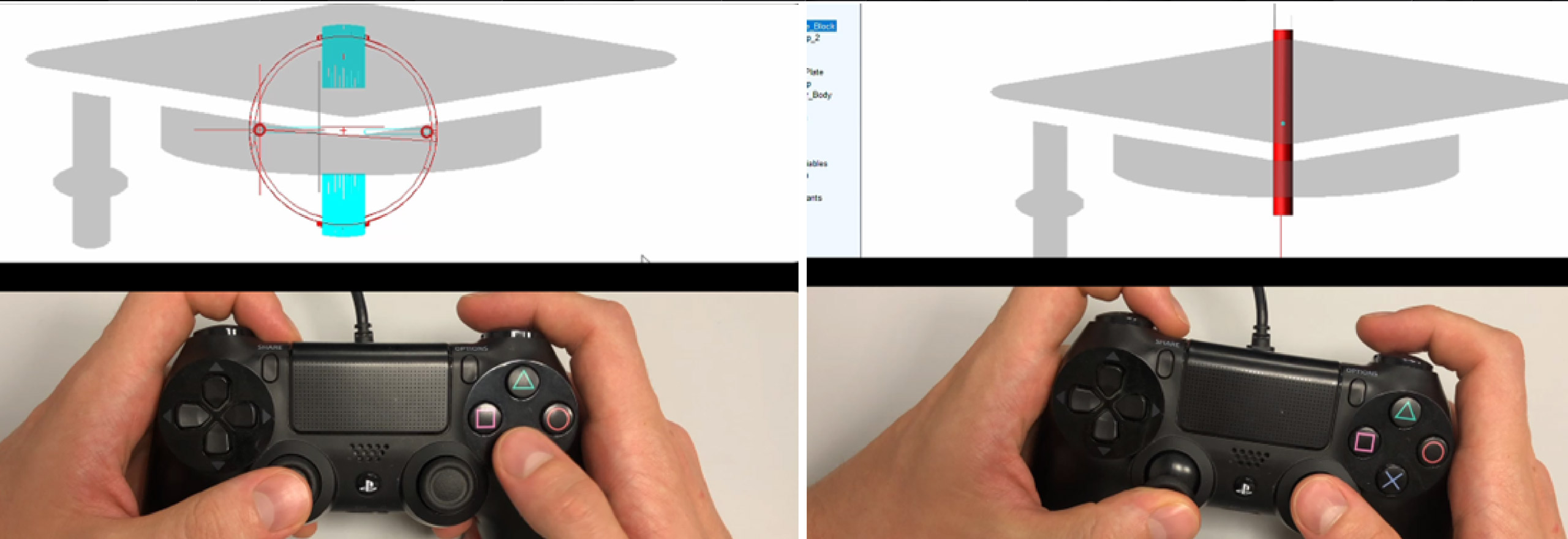
テストでは、アルゴリズムが ADAMS View で開発されたシミュレーション環境のリアルタイム管理を可能にする能力を実証しました。図 7 は、テストが行われるビデオのスクリーンショットを示しています。

図 7。リアルタイムコントローラーをテストしたビデオのスクリーンショット。
結論
原子力エネルギーの状況、特に廃止措置セクターでは、学術界と産業の両方でデジタルツイン技術の重要性の認識が高まっています。デジタルツインのコンセプトは、ビッグデータ分析と関連付けられ、スマートな製造の原則に沿って互いを強化する技術の組み合わせを表しています。
デジタルツインは、製品やプロセスのライフサイクル全体にわたって物理データと仮想データをシームレスに統合し、高度な分析方法で効率的に処理できる膨大なデータを生成します。これらの分析から得られた洞察は、後でプロセスパフォーマンスを改善し、原子力発電所の廃止などのタスクでオペレーターを教育 / 訓練するために使用できます。
そこで、先進的な真空把持技術を用いた黒鉛減速炉の廃止措置シナリオを研究するために、ADAMSのマルチフィジックス環境とリアルタイムでインターフェースするSimulink制御システムが初めて開発されました。結果は、革新的なソリューションの開発だけでなく、廃止措置シナリオの設計と最適化にも役立つ有望なアルゴリズムを示しています。