실시간 컨트롤러 Hexagon/Adams 및 MATLAB/Simulink의 개발
조사된 흑연 블록을 취급하기 위한 혁신적인 진공 그리핑 시스템 연구
밀라노공과대학 원자력 엔지니어링 사업부 에너지 부서 Riccardo Chebac, Fabio Vanoni, Alessandro Porta, Fabrizio Campi
엔지니어링 리얼리티 2024 볼륨 1
스마트 제조 가속화
흑연은 역사적으로 원자력 산업에서 감속재이자 반사체로 광범위하게 사용되어 왔습니다. 피치보텀 고온가스 냉각로(HTGR), 초고온가스로(UHTREX), 융용염 원자로 실험(MSRE) 등 다양한 실험용 원자로 제품군에서 사용되고 있으며, KIWI 및 로켓 차량 응용을 위한 핵 엔진(NERVA)과 같은 원자로를 이용한 원자력 추진뿐만 아니라 비산화 마그네슘(MAGNOX), 레악터 볼쇼이 모쉐노스티 카날니(RBMK) 및 고급 가스 냉각 원자로(AGR)와 같은 상업용 원자로 유형에서도 사용되고 있습니다.
보다 우수한 조절 능력을 갖춘 재료도 있지만, 흑연은 비산화 환경에서 불활성 특성과 고온 저항성이 안정적인 생산 및 제조 기술과 결합되면서 구세대 및 고급 원자로의 원자력 산업에서 널리 사용되고 있습니다. 이 흑연이라는 물질의 주된 문제는 흑연을 조사한 후 및 발전소를 해체하는 중에 발생합니다. 바로 폐기물 부피, 수명이 긴 방사성 핵종의 존재, 위그너 에너지 및 흑연의 취화입니다. 이로 인해 해체 비용이 5배 증가하고 MWh당 폐기물량이 경수로(LWR)에 비해 10배 증가합니다.
이러한 문제로 인해 이 기술의 해체 프로젝트는 단 4개만 성공적으로 완료되었습니다. Windscale의 고급 가스 냉각 원자로 Fort St. Vrain, GLEEP 원자로 및 Brookhaven National Laboratory 연구 원자로입니다. 이러한 이유로 이 기술의 해체 프로세스에는 개선해야 할 부분이 많습니다. 이를 위해 H2020 Inno4graph와 같은 유럽 프로젝트가 출범되었습니다. 디지털 트윈 개념이 최적화라는 맥락에서 원자력 산업에서 확대되고 있습니다. 발전소의 측면에서 보면 디지털 트윈은 신규 및 기존 발전소 모두에 적용할 수 있는 발전소 및 시스템 전체의 개별 구성 요소를 모델링하는 데 사용되는 물리학 및 분석 접근법을 기반으로 한 결합된 방법이라고 할 수 있습니다.
이러한 시스템은 다양한 발전소의 수명 단계에서 운영 한계를 분석하고 제공할 수 있습니다. 특히 흑연 기반 원자로의 해체에는 위험한 활동과 불확실성이 있는 복잡한 프로젝트가 포함됩니다. 많은 핵 구조물이 디지털 시대 이전에 건설되었으므로 관련 문서는 오래되었고 불완전합니다. 이러한 과제를 해결하기 위해서는 핵 자산의 안전하고 효과적인 해체를 보장하기 위한 다양한 기술과 새로운 접근법이 필요합니다. 이와 관련하여 디지털 트윈 기술은 작업자가 작업을 보다 정밀하고 측정 가능한 방식으로 이해하는 데 크게 도움을 줄 수 있습니다.
이러한 점을 바탕으로 이 작업은 헥사곤의 ADAMS 다체 역학 소프트웨어로 개발한 MAGNOX 원자로용 디지털 트윈의 첫 번째 반복을 제시합니다. 혁신적인 진공 기반 그리핑 시스템을 사용하여 흑연 블록의 인양 및 취급 가능성을 연구할 것입니다. 로봇 모델은 동작 프로필과 동종 최초의 Simulink 및 ADAMS 간 실시간 컨트롤러를 모두 사용합니다. 이 컨트롤러는 시스템의 기계적-물리적 정보를 입력으로 사용하여 블록 제거 가능성 시나리오에 대한 실시간 응답을 제공합니다.
실시간 컨트롤러와 결합된 시뮬레이터는 운영자가 해체 공정을 감독해야 하는 시나리오를 연구하는 데 효과적이고 유망한 것으로 입증되었고, 전체 흑연 매개 원자로 노심의 해체에 대한 의사 결정 프로세스를 지원할 수 있습니다.
측량학
구성 요소 및 작업 환경
ADAMS View에서 인양 기능을 연구하는 데 사용되는 CAD 모델은 그림 1에 나와 있습니다. 흑연 블록(그림 1(a))은 라티나 원자로에 사용된 PGA 흑연의 기하학적 및 물리적 특성을 상세하게 모델로 나타낸 것으로 중량은 57.4kg입니다. 엔드 이펙터는 진공 시스템의 인양 능력을 연구하기 위해 단순화된 모델(그림 1(b))로 나타냈습니다. 두 진공 그리퍼 시스템은 중앙 축을 기준으로 반경 방향으로 제약을 가하며 서로 반대편에 배치되어 있습니다. 진공 시스템 오작동 시 추가적인 보호층으로써 일련의 보조 암이 추가되었습니다.
이 작업에 사용된 컴퓨터는 16GB RAM의 Dell XPS 15 9570, Intel Core i7-8750H CPU, 전용 Nvidia GeForce GTX 1050 Ti 그래픽 카드 및 Microsoft Windows 10 운영 체제입니다. 그림 2의 시뮬레이션 환경은 MAGNOX 원자로 노심의 해체 중에 발생하는 현실적인 시나리오를 나타냅니다.
블록과 인양 시스템이 중앙에 놓여 있고 반경 방향으로 제약을 받습니다. 이 옵션을 선택하면 작동 중에 블록의 중심 맞추기를 걱정하지 않고 시스템의 하강 및 인양 그리고 필요한 진공 시스템 밀봉 기능을 연구할 수 있습니다.
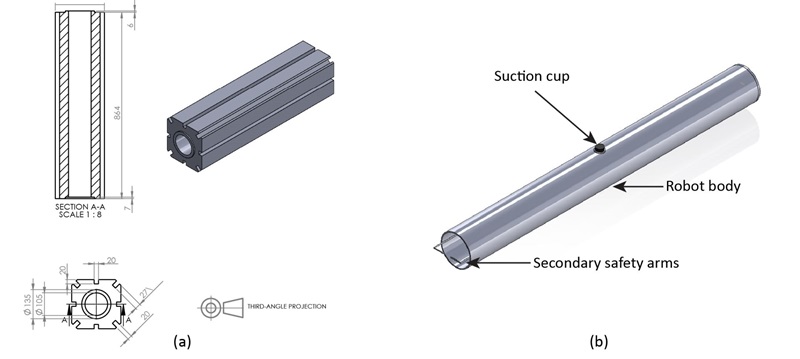
그림 1 (a) 라티나 8각형 흑연 블록의 CAD 모델 및 (b) ADAMS 내에서 사용되는 진공 시스템의 CAD 모델.
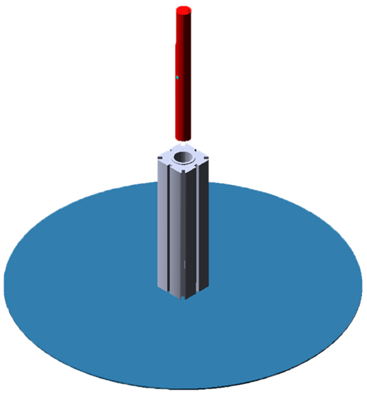
그림 2. 흑연 블록과 로봇 시스템을 포함하는 ADAMS 시뮬레이션 환경.
인양 시스템 컨트롤러
시스템에 미치는 중량력의 영향을 고려하여 Simulink에서 PD(비례 도함수) 컨트롤러를 설계했습니다. 이를 통해 진동을 줄이면서 시스템의 새로운 안정 상태를 더 빨리 달성할 수 있습니다. 이러한 유형의 컨트롤은 중력에 의해 영향을 받는 모든 구성요소에 사용되었습니다. 로봇의 수직 위치, 흡입 컵의 반경 방향 이동 및 보조 암의 수직 이동이 여기에 해당됩니다.
보상기를 첨가하지 않은 PD 컨트롤러를 보조 암의 회전에 사용하였습니다. 그림 3은 컨트롤러를 나타내며, 주황색 블록은 ADAMS 환경과의 연결을 나타냅니다. 표 1은 개발된 다양한 제어 시스템의 비례 및 미분 게인 값을 보여줍니다.
|
제어 |
통제 변수 |
Kp |
Kd |
|
흡입 컵 이동 |
축 중심으로부터 흡입 컵까지의 거리 |
0.5 |
0.05 |
|
로봇 수직 이동 |
지면에서 로봇까지의 거리 |
2.5 |
0.5 |
|
보조 암 수직 이동 |
로봇 상단 플레이트에서 암까지의 거리 |
0.5 |
0.01 |
|
보조 암 회전 |
암 축에 대한 회전 |
0.000025 |
0.00009 |
표 1. 다양한 제어 변수에 사용되는 비례 및 미분 게인 값.
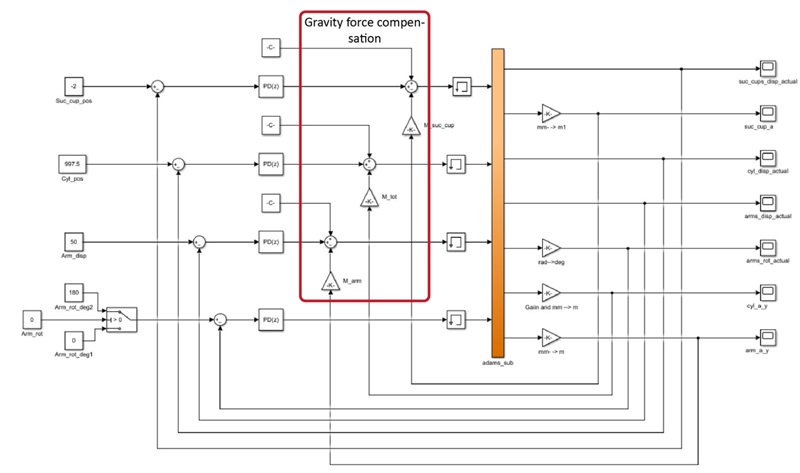
그림 3. 인양 시스템에 사용되는 Simulink 컨트롤러의 블록 다이어그램.
실시간 제어
실시간 제어 시스템을 개발하기 위해 외부 조이스틱을 사용하여 컨트롤러의 입력 데이터를 수정하는 작업을 수행했습니다. 일반적으로 컨트롤러는 결과 단락에 나와 있는 것처럼 모션 곡선을 입력으로 허용하거나 MATLAB 및 Simulink에 두 개의 애드온을 추가하여 모델을 시작하기 전에 값을 설정합니다. Simulink 데스크톱 실시간 기능 및 Vrjoystick을 통해 외부 조이스틱을 통해 제어할 수 있는 알고리즘을 개발할 수 있었습니다.
조이스틱은 컨트롤러를 변경하지 않고 그림 4에 요약된 바와 같이 입력 파라미터만 변경합니다. 그러면 컨트롤러가 ADAMS 모델 업데이트를 진행합니다. 축과 버튼의 값은 사용 중인 특정 컨트롤러에 따라 달라집니다.
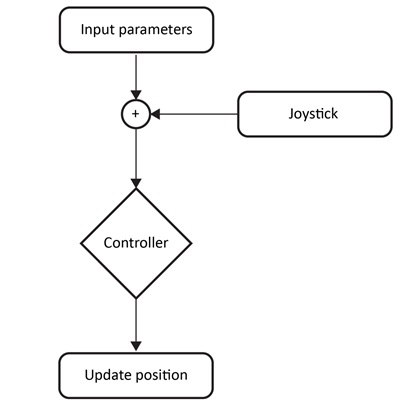
그림 4. 조이스틱과 컨트롤러 시스템의 흐름도.
이 예시의 파라미터는 Sony PlayStation 4 컨트롤러용입니다. PS4 컨트롤러는 USB를 통해 Windows 노트북에 연결해야 합니다. 이 경우 컨트롤러로 즉시 인식되며 추가 단계가 필요하지 않습니다. 시작하기 전에 코드가 컨트롤러와 연결되었는지 확인합니다. 결과가 부정적인 경우 시뮬레이션이 중단됩니다. 시뮬레이션은 무제한으로 실행되도록 설계되었습니다.
두 가지 모드가 가능합니다. 배치 및 대화형 모드입니다. 배치 모드는 Simulink 내에서만 시뮬레이션을 계속 실행합니다. 즉, 위치, 회전 등만을 의미합니다. 플롯이 제공되며 업데이트됩니다. 대화형 모드에서는 ADAMS 뷰어가 열리고 3D 환경이 컨트롤러 입력으로 실시간으로 표시 및 업데이트됩니다.
결과
두 가지 사례 연구를 아래에 제시했습니다. 첫 번째는 원자로 해체 중 흑연 블록을 들어올리기 위한 현실적인 접근법을 보여주기 위해 설계된 운동 곡선을 사용하는 것입니다. 두 번째는 컨트롤러가 실시간으로 작동하는 것을 보여주는 것입니다.
사례 연구 1: 모션 곡선을 이용한 제어
그림 5 및 6은 인양 공정의 예시를 보여줍니다. 추출 공정은 다음과 같습니다.
- 흑연 블록의 채널 내부로 로봇 하강
- 흡입 컵이 팽창하고 흑연 내부 벽과의 접촉 및 진공 시스템의 점화
- 지상고가 있는 미세한 초기 인양
- 보조 암의 하강 및 외회전
- 보조 암을 흑연 블록 베이스에 걸고 고정
- 최종 인양
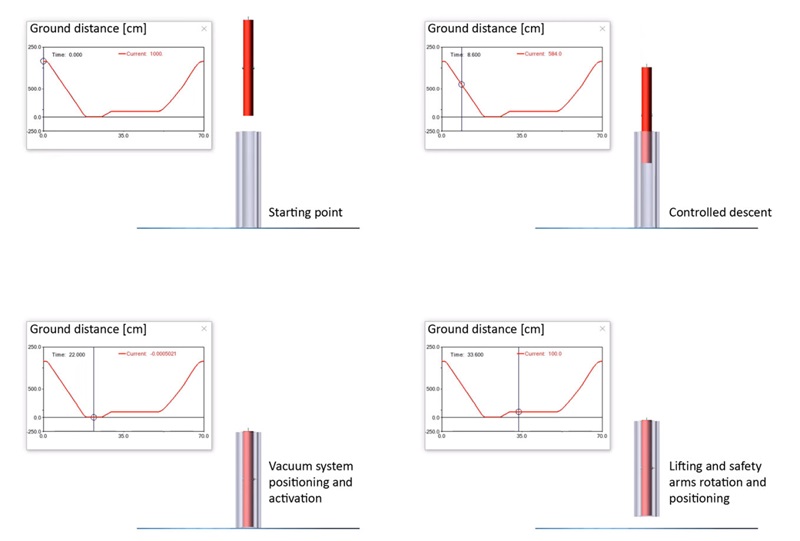
그림 5. 진공 시스템을 사용한 흑연 블록 추출의 모션 곡선 예시.
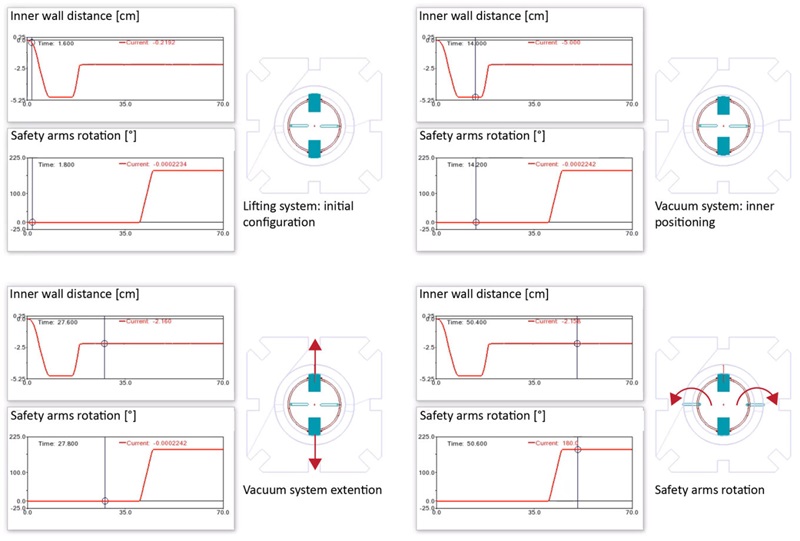
그림 6. 흑연 추출 절차 중 흡입 컵 및 안전 암 작동의 모션 곡선 예시.
사례 연구 2: 조이스틱을 통한 실시간 제어
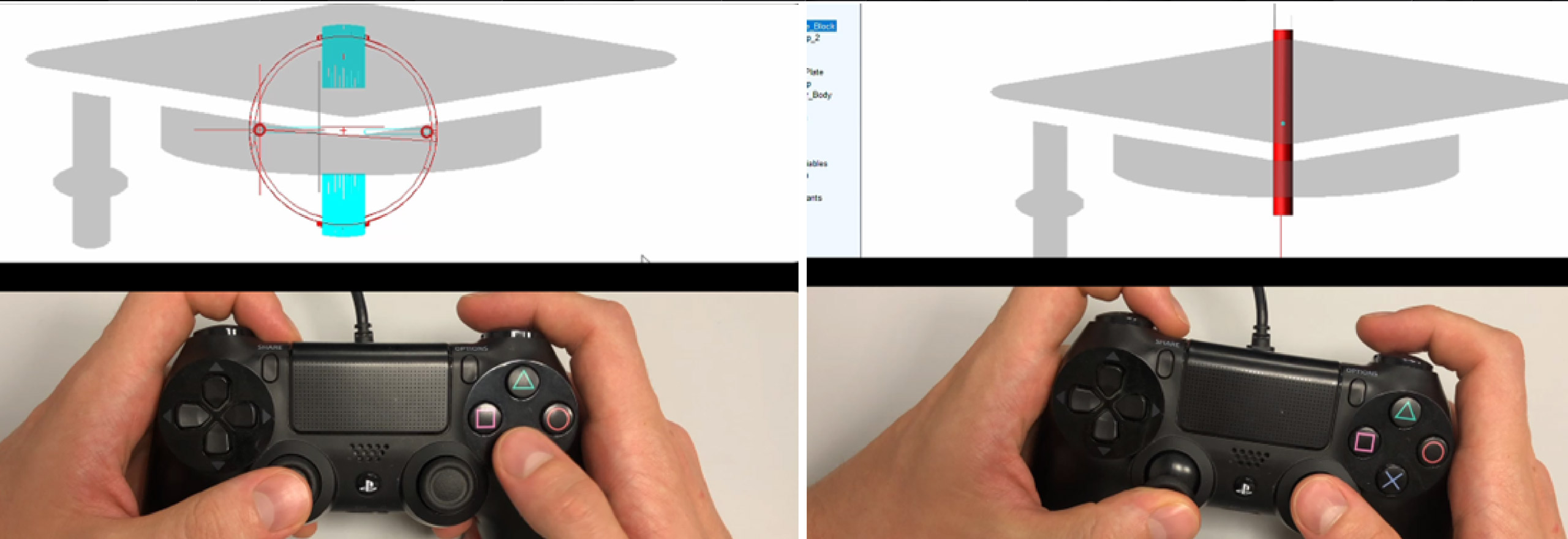
이 테스트는 ADAMS View에서 개발한 시뮬레이션 환경의 실시간 제어 기능을 허용하는 알고리즘의 능력을 입증했습니다. 그림 7은 테스트 동영상의 스크린숏입니다.

그림 7. 실시간 컨트롤러 테스트 동영상의 스크린숏.
결론
원자력 에너지 중에서도 특히 해체 부문의 학계와 산업 모두에서 디지털 트윈 기술의 중요성에 대한 인식이 높아지고 있습니다. 빅 데이터 분석과 관련시킨 디지털 트윈의 개념은 스마트 제조 원칙과 나란히 서로를 강화하는 기술의 조합을 나타냅니다.
디지털 트윈은 제품 또는 공정의 전체 수명 주기 동안 물리적 및 가상 데이터를 완벽하게 통합하여 고급 분석 방법을 통해 효율적으로 처리할 수 있는 상당한 데이터를 생성할 수 있습니다. 이러한 분석에서 파생된 인사이트는 추후 공정 성능을 개선하고 원자력 발전소 해체와 같은 작업에서 작업자를 교육하는 데 사용할 수 있습니다.
이러한 맥락에서 고급 진공 그리핑 기술을 갖춘 흑연 기반 원자로의 해체 시나리오를 연구하기 위해 ADAMS의 다물리학 환경과 실시간으로 인터페이스하는 Simulink 제어 시스템이 처음으로 개발되었습니다. 결과는 혁신적인 솔루션을 개발했을 뿐만 아니라 해체 시나리오의 설계 및 최적화에도 도움을 줄 수 있는 유망한 알고리즘을 보여줍니다.