Sviluppo di un controller in tempo reale Hexagon/Adams e MATLAB/Simulink
Per lo studio di un innovativo sistema di presa a vuoto per la movimentazione di blocchi di grafite irradiati
Di Riccardo Chebac, Fabio Vanoni, Alessandro Porta, Fabrizio Campi Politecnico di Milano, Dipartimento Energia, Divisione Ingegneria Nucleare
Engineering Reality 2024 volume 1
Accelerare la produzione intelligente
La grafite ha trovato storicamente largo impiego in ambito nucleare sia come moderatore che come riflettore. Il suo utilizzo è menzionato in varie famiglie di reattori sperimentali come il reattore ad alta temperatura raffreddato a gas Peach Bottom (HTGR), l'esperimento del reattore nucleare ad altissima temperatura (UHTREX), l'esperimento del reattore a sale fuso (MSRE), nella propulsione nucleare con reattori come KIWI e nel motore nucleare per applicazioni su veicoli a razzo (NERVA), nonché in tipi di reattori commerciali come quello per magnesio non ossidante (MAGNOX), Reaktor Bolshoy Moshchnosty Kanalny (RBMK) e reattore raffreddato a gas avanzato (AGR).
Sebbene esistano materiali con migliori capacità di moderazione, la natura inerte della grafite in un ambiente non ossidante e la sua resistenza alle alte temperature, combinate con tecnologie di produzione e fabbricazione consolidate, le hanno consentito di essere ampiamente utilizzata nell'industria nucleare per reattori più o meno avanzati. Le problematiche principali con questo materiale si manifestano dopo l'irraggiamento e durante lo smantellamento di questi impianti. I principali ostacoli sono il volume delle scorie, la presenza di radionuclidi a lunga vita, l'energia di Wigner e l'infragilimento della grafite. Ciò comporta costi di smantellamento cinque volte superiori e un volume di rifiuti dieci volte maggiore per MWh rispetto ai reattori ad acqua leggera (LWR).
Queste sfide hanno portato al completamento di soli quattro progetti di smantellamento di questa tecnologia con diversi gradi di successo: Fort St. Vrain, il reattore avanzato raffreddato a gas di Windscale, il reattore GLEEP e il reattore di ricerca del Brookhaven National Laboratory. Pertanto il processo di disattivazione di questa tecnologia può essere ancora notevolmente migliorato. A tale scopo sono stati creati progetti europei come H2020 Inno4graph. Nel contesto dell'ottimizzazione, il concetto di gemello digitale sta guadagnando terreno nell'industria nucleare. Quando si tratta di centrali elettriche il gemello digitale può essere visto come un metodo combinato basato su approcci fisici e analitici utilizzati per modellare singoli componenti dell'impianto ed il sistema nel suo complesso, che possono essere applicati sia a impianti nuovi che a quelli vecchi.
Questi sistemi consentono di analizzare e prevedere limiti operativi durante le varie fasi di vita dell'impianto. In particolare, lo smantellamento dei reattori a grafite comporta progetti complessi caratterizzati da attività pericolose e incertezze. Molti impianti nucleari sono stati costruiti prima dell'era digitale, quindi i documenti sono obsoleti e incompleti. Affrontare questa sfida richiede diverse competenze e nuovi approcci per garantire lo smantellamento sicuro ed efficace degli impianti nucleari preesistenti. A questo proposito la tecnologia dei gemelli digitali può aiutare notevolmente gli operatori ad acquisire una comprensione più precisa e misurabile delle attività.
Alla luce di ciò, questo lavoro presenta la prima iterazione di un gemello digitale per un reattore MAGNOX sviluppato con il software di dinamica multibody Adams di Hexagon. Esamineremo la possibilità di sollevare e movimentare blocchi di grafite utilizzando un innovativo sistema di presa basato sul vuoto. Il modello del robot utilizzerà sia i profili di movimento che un controller in tempo reale tra Simulink e Adams, il primo del suo genere. Il controller utilizza le informazioni fisico-meccaniche del sistema come input per fornire risposte in tempo reale a possibili scenari di rimozione dei blocchi.
Il simulatore, abbinato al controller in tempo reale, si rivela efficace e promettente per studiare scenari in cui il processo di smantellamento deve essere supervisionato da un operatore, consentendo eventualmente di prendere decisioni relative allo smantellamento dell'intero nucleo del reattore moderato a grafite.
Metodologia
Componenti e ambiente di lavoro
I modelli CAD utilizzati per studiare le capacità di sollevamento in Adams View sono presentati nella Figura 1. Per il blocco di grafite (Figura 1 (a)), è stato utilizzato un modello dettagliato delle proprietà geometriche e fisiche della grafite PGA utilizzata nel reattore Latina, del peso di 57,4 kg. Per quanto riguarda l'effettore finale, è riportato un modello semplificato (Figura 1 (b)) per studiare le capacità di sollevamento del sistema a vuoto. Due sistemi di presa a vuoto, collegati con vincoli traslazionali in senso radiale rispetto all'asse centrale del sistema, sono posizionati in maniera diametralmente opposta l'uno all'altro. È stata aggiunta una serie di bracci secondari come ulteriore livello di protezione in caso di malfunzionamento del sistema a vuoto.
Il computer utilizzato è un Dell XPS 15 9570 con 16 GB di RAM, CPU Intel Core i7-8750H, scheda grafica dedicata Nvidia GeForce GTX 1050 Ti e sistema operativo Microsoft Windows 10. L'ambiente di simulazione nella Figura 2 illustra uno scenario reale incontrato durante lo smantellamento dei nuclei dei reattori MAGNOX.
Il blocco e il sistema di sollevamento sono stati centrati e fissati con vincoli traslazionali. Questa scelta consente di studiare l'abbassamento e il sollevamento del sistema e le capacità di tenuta del sistema a vuoto richieste senza preoccuparsi del centraggio del blocco durante le operazioni.
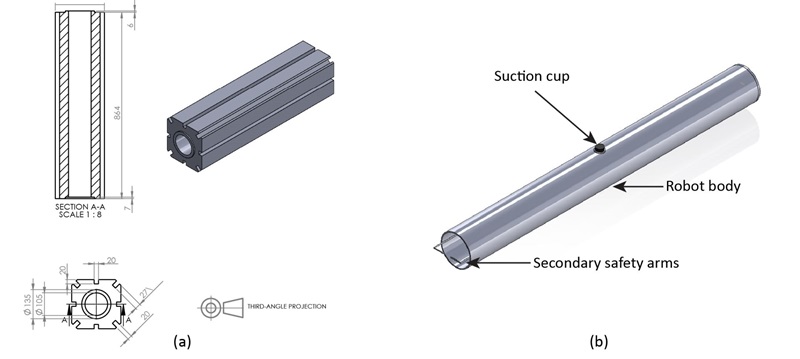
Figura 1. (a) modelli CAD dei blocchi ottagonali di grafite di Latina e (b) modello CAD del sistema a vuoto utilizzato all'interno di ADAMS.
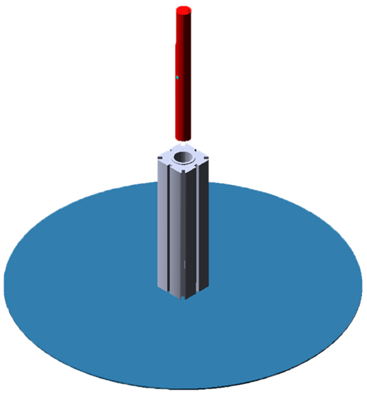
Figura 2. Ambiente di simulazione Adams contenente il blocco di grafite e il sistema robotico.
Controller del sistema di sollevamento
È stato progettato un controller PD (Proporzionale Derivativo) in Simulink, tenendo conto dell'effetto della forza del peso sul sistema. Ciò consente di raggiungere più rapidamente un nuovo equilibrio del sistema e di ridurre le oscillazioni. Questo tipo di controllo è stato utilizzato per tutti i componenti interessati dalla gravità: la posizione verticale del robot, il movimento di traslazione radiale delle ventose e il movimento verticale dei bracci secondari.
Per la rotazione dei bracci secondari è stato utilizzato un controller PD senza l'aggiunta di un compensatore. La Figura 3 mostra il controller, con il blocco arancione che rappresenta la connessione all'ambiente ADAMS. La Tabella 1 presenta i valori di incremento proporzionale e derivato per i vari sistemi di controllo sviluppati.
|
Controllo |
Variabile controllata |
Kp |
Kd |
|
Traslazione delle ventose |
Distanza della ventosa dal centro dell'asse |
0,5 |
0,05 |
|
Traslazione verticale del robot |
Distanza del robot dal suolo |
2,5 |
0,5 |
|
Traslazione verticale dei bracci secondari |
Distanza del braccio dalla piastra superiore del robot |
0,5 |
0,01 |
|
Rotazione dei bracci secondari |
Rotazione rispetto all'asse del braccio |
0,000025 |
0,00009 |
Tabella 1. Valori di incremento proporzionale e derivato utilizzati per le diverse variabili controllate.
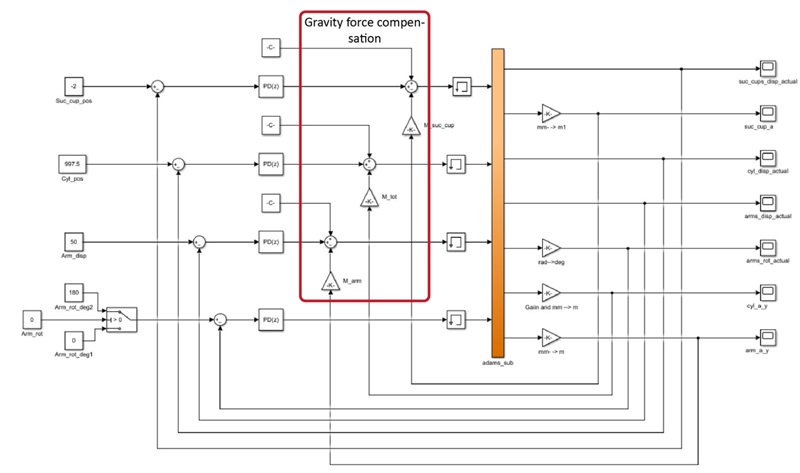
Figura 3. Schema a blocchi del controller Simulink utilizzata per il sistema di sollevamento.
Monitoraggio in tempo reale
Si è lavorato per modificare i dati di ingresso del controller utilizzando un joystick esterno per sviluppare il sistema di controllo in tempo reale. In generale il controller accetta le curve di movimento come input, come mostrato nella sezione Risultati, o impostando i valori prima di avviare il modello con l'aggiunta di due componenti supplementari in MATLAB e Simulink. Nel desktop di Simulink in tempo reale e in Vrjoystick è stato possibile sviluppare un algoritmo che consentisse il controllo tramite un joystick esterno.
Pertanto il joystick non modifica il controller, ma solo i parametri di ingresso, come riassunto nella Figura 4. Il controller procede quindi con l'aggiornamento del modello Adams. I valori degli assi e dei pulsanti dipendono dal controller specifico utilizzato.
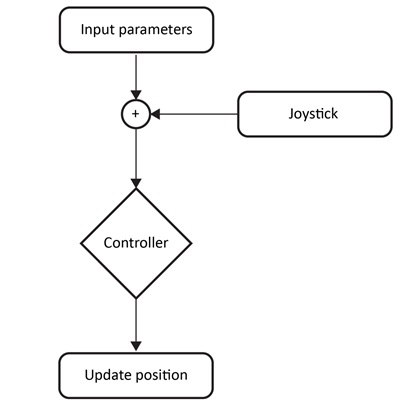
Figura 4. Diagramma di flusso del sistema joystick più controller.
I parametri in questo esempio si riferiscono a un controller Sony PlayStation 4. Il controller PS4 deve essere collegato tramite USB a un laptop Windows. In questo caso sarà immediatamente riconosciuto come controller e non sarà necessario alcun ulteriore passo. Il codice, prima dell'avvio, verifica se il controller è collegato; in caso di risultato negativo, la simulazione si arresta. La simulazione è progettata per essere eseguita all'infinito.
Sono disponibili due modalità: batch e interattiva. La modalità batch mantiene la simulazione in esecuzione solo all'interno di Simulink, il che significa che verranno forniti e aggiornati solo i grafici di posizione, rotazione, ecc. La modalità interattiva apre il visualizzatore Adams e l'ambiente 3D è mostrato e aggiornato in tempo reale con gli input del controller.
Risultati
Di seguito saranno presentati due casi applicativi: il primo utilizza curve di movimento progettate per mostrare un approccio realistico al sollevamento di blocchi di grafite durante lo smantellamento del reattore. Il secondo mostra il controller in funzione in tempo reale.
Caso applicativo 1: controllo tramite curva di movimento
Le figure 5 e 6 mostrano esempi del processo di sollevamento. Il processo di estrazione è il seguente:
- Discesa del robot all'interno del canale del blocco di grafite
- Espansione delle ventose, contatto con le pareti interne della grafite e accensione del sistema a vuoto
- Leggero sollevamento iniziale con distacco da terra
- Abbassamento e rotazione verso l'esterno dei bracci ausiliari
- Aggancio dei bracci secondari alla base del blocco di grafite e fissaggio
- Sollevamento finale
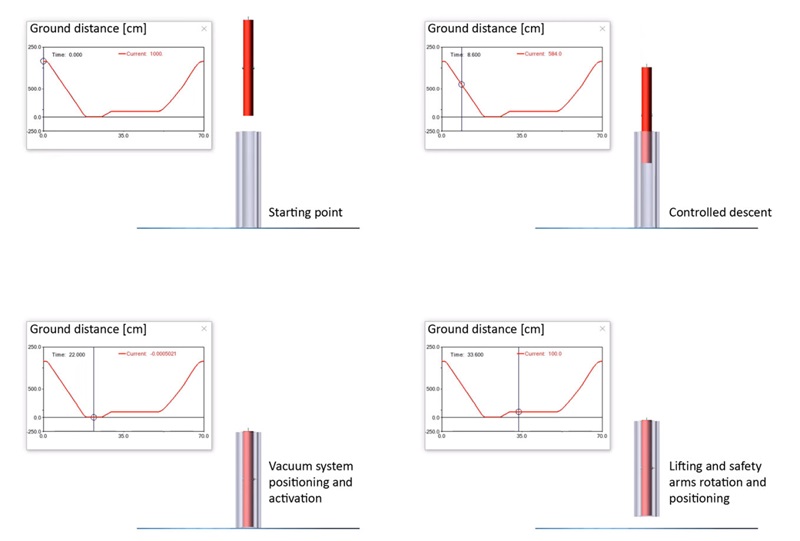
Figura 5. Esempio di curva di movimento per l'estrazione di blocchi di grafite utilizzando sistemi a vuoto.
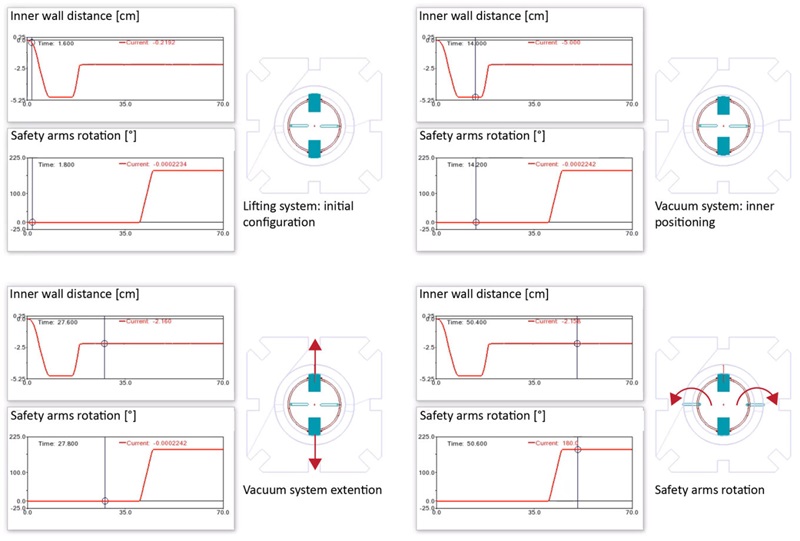
Figura 6. Esempio di curva di movimento per il funzionamento delle ventose e dei bracci di sicurezza durante una procedura di estrazione della grafite.
Caso applicativo 2: controllo in tempo reale con joystick
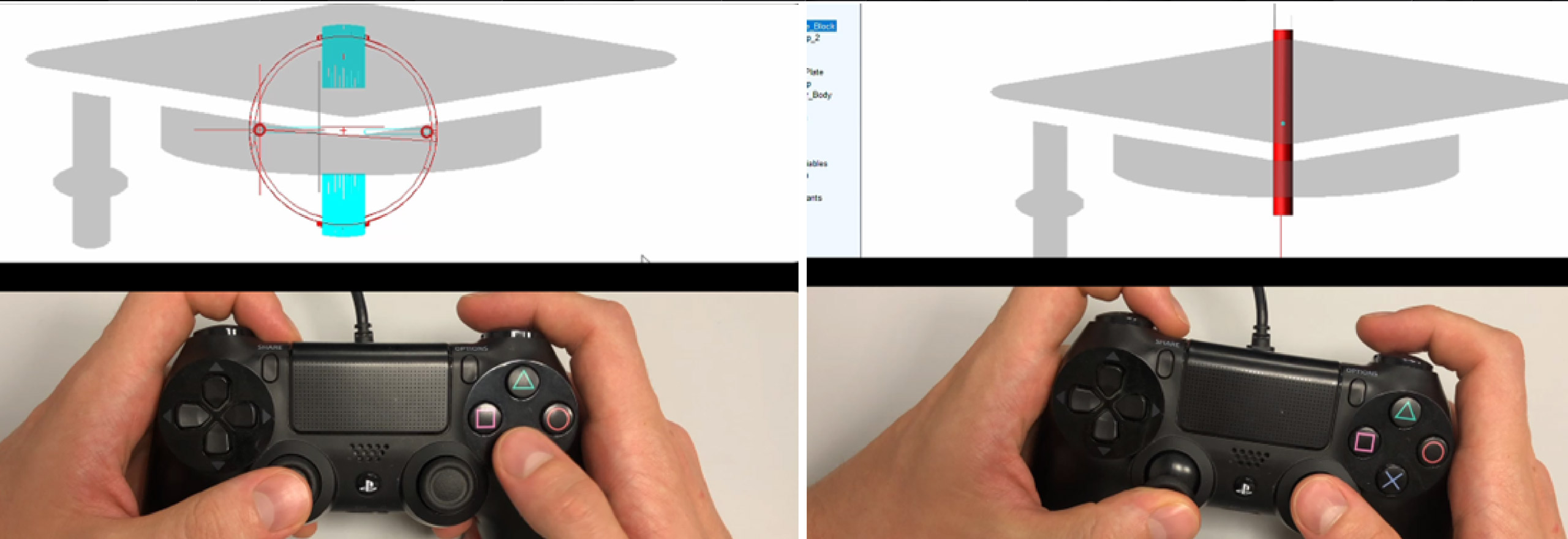
I test hanno dimostrato la capacità dell'algoritmo di consentire il controllo in tempo reale dell'ambiente di simulazione sviluppato in Adams View. La Figura 7 mostra uno screenshot del video in cui si eseguono i test.

Figura 7. Screenshot del video in cui si testa il controller in tempo reale.
Conclusioni
Nell'ambito dell'energia nucleare, in particolare nel settore dello smantellamento, sta emergendo un crescente riconoscimento dell'importanza della tecnologia dei gemelli digitali, sia nella comunità accademica che nell'industria. Il concetto di gemello digitale, associato all'analisi dei big data, rappresenta una combinazione di tecnologie che si potenziano a vicenda, allineandosi ai principi della produzione intelligente.
I gemelli digitali possono integrare perfettamente i dati fisici e virtuali durante l'intero ciclo di vita di un prodotto o di un processo, generando dati consistenti che possono essere elaborati in modo efficiente attraverso metodologie analitiche avanzate. Le informazioni derivate da queste analisi possono essere utilizzate in seguito per migliorare le prestazioni dei processi e insegnare/formare gli operatori su attività come lo smantellamento dei reattori nucleari.
In questo contesto è stato sviluppato per la prima volta un sistema di controllo Simulink che si interfaccia in tempo reale con un ambiente multifisico in Adams per studiare scenari di smantellamento di reattori moderati a grafite con tecnologie avanzate di presa a vuoto. I risultati mostrano un algoritmo promettente che potrebbe aiutare sia nello sviluppo di soluzioni innovative che nella progettazione e nell'ottimizzazione di scenari di smantellamento.