Tecniche di cosimulazione MB e FEM non lineare per l’analisi della meccanica della presa con applicazione in campo industriale e protesico
Università degli studi di Cassino e del Lazio Meridionale
Contact us
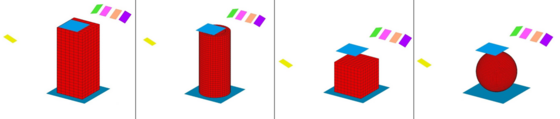
Partendo da quanto svolto durante un periodo di tirocinio presso MSC Software (ora Design & Engineering di Hexagon Manufacturing Intelligence), in cui si è posto come obiettivo quello di investigare l’interazione MB e FEM non lineare, ovvero tra corpi rigidi e corpi deformabili in una simulazione dinamica, quindi la presa di un oggetto morbido\deformabile mediante un gripper industriale a due dita sfruttando una tecnologia di co-simulazione MB e FEM non lineare, in questo lavoro di tesi è stata studiata, applicata e testata ulteriormente tale tecnologia approfondendo e modellando opportunamente un sistema MB-FEM in uno spazio 3D applicandolo a diverse casistiche di movimentazione per poi apporre la stessa metodologia ad un’applicazione realistica quale l’utilizzo di una protesi robotica, cioè l’analisi , la progettazione modellistica e la simulazione di una protesi per bambini. La mano è il primo strumento del genere umano, capace di compiere innumerevoli azioni ed una varietà estremamente ampia di funzioni e di abilità che vengono utilizzate nelle diverse attività della vita quotidiana, lavorativa e sportiva. In questo lavoro di tesi, per analizzare le caratteristiche e le potenzialità di analisi di co-simulazione è stato scelto di realizzare il blocco articolare mano-polso in ambiente MB (Fig.1) ed oggetti deformabili in ambiente FEM (Fig.2).

Il disegno della mano protesica è stato realizzato cercando di ricalcare, per quanto possibile, le dimensioni di un reale arto malformato ricavate, tramite un software di elaborazione grafica.
Per la struttura delle dita è stata scelta una configurazione a due falangi al fine di ottenere una semplificazione sia dal punto di vista costruttivo sia in termini di quantità di pezzi da stampare, rendendo la protesi più facile da montare e più economica.
All’interno di MSC Adams è stata definita la topologia del modello scegliendo i vincoli opportuni tra le parti e sono stati realizzati dei MOTION per definire il movimento delle falangi e del polso nonché il moto di traslazione della protesi robotica nello spazio.
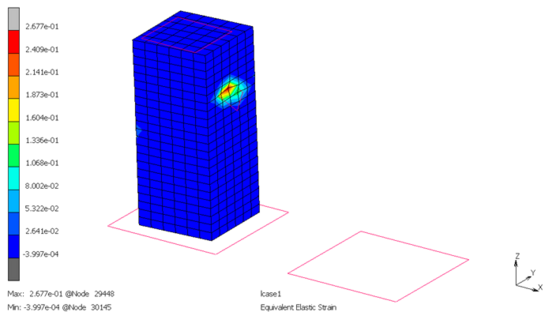
È stata definito in MSC Marc un corpo rettangolare deformabile caratterizzato da una larghezza di 40mm, lunghezza di 40mm ed un’altezza di 92mm posto su una superficie iniziale di appoggio. In maniera analoga sono stati realizzati altri tre oggetti, uno di forma sferica, un oggetto di forma cilindrica ed un cubo. Il cilindro presenta un diametro di base di 43 mm, uno spessore di 6.5 mm ed è alto 90 mm.
Il cubo presenta una base caratterizzata da una larghezza 40 mm, una lunghezza di 40 mm ed un’altezza di 40 mm. Infine, la sfera ha un diametro di 50 mm ed uno spessore interno di 3 mm. È stato scelto Mooney come materiale per tutti gli oggetti, definendo i valori delle costanti C10=2 e C01=8. All’interno dei modelli Marc sono state realizzate le superfici di contatto che andranno in presa con gli oggetti (Fig.4). Superfici piane e/o curve delle falangi della mano a seconda dei casi di studio (Fig.5).

A queste superfici sono stati associati i nodi di controllo che, tramite l’ausilio di MSC Cosim, sono stati accoppiati alle GForce definite all’interno del modello MB in Adams.
Lo scopo del lavoro è stato quello di:
- Definire una procedura efficace al fine di garantire una corretta presa dell’oggetto desiderato per la produzione di esempi completi di co-simulazione MB-FEM.
- Produrre ed analizzare spostamenti, deformazioni e stress, ovvero grandezze che forniscono la quantificazione dei processi analizzati.
Di seguito sono riportati due casi principali di studio:
- Mano protesica durante la presa dell’oggetto
- Mano protesica durante la presa dell’oggetto, movimentazione fino ad una certa superficie e rilascio dell’oggetto.
CASO 1
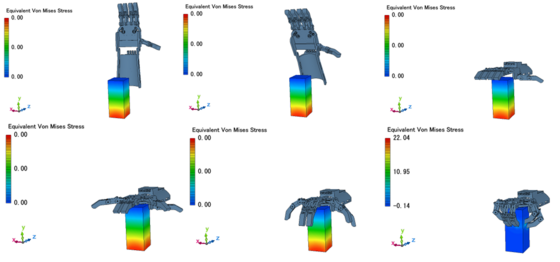
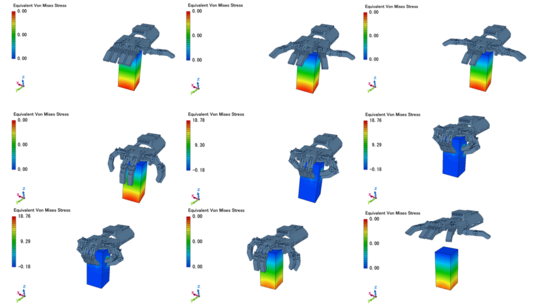
Il primo modello studiato consiste nell’afferrare il corpo rettangolare tramite l’ausilio della mano e nel far compiere al sistema un moto rotatorio attorno all’asse X. Le superfici della protesi sono caratterizzate da un coefficiente d’attrito pari a 0.5, la base invece da un coefficiente pari a 0.8. La presa del rettangolo viene realizzata impostando una rotazione del polso di 90° attorno all’asse X, successivamente l’indice ed il mignolo si aprono a ventaglio rispetto alle altre dita mediante una rotazione arbitraria di 80° intorno ad Y ,al termine della quale tutte le falangi superiori e inferiori ruoteranno, rispetto ad i propri assi, per garantire l’afferraggio dell’oggetto. Il contatto e la successiva presa tra il corpo rettangolare e le superfici è garantito nel momento in cui entrambe le geometrie si toccano. Sono stati considerati dieci differenti casi all’interno dei quali sono stati scelti arbitrariamente gli angoli di rotazione delle falangi superiori e inferiori al fine di poter definire un modello indicativo quanto più possibile vicino al reale movimento di presa della protesi. Il movimento raffigurato è un movimento di primo tentativo caratterizzato da un apertura eccessiva ma finalizzata prettamente a garantire l’afferraggio. Le superfici della mano producono uno schiacciamento ed una deformazione degli oggetti con la nascita di uno stato di sforzo e deformazione. Nella Figura 5 vengono riportate alcune fasi del moto realizzate mediante l’ausilio del software scPOST, il quale consente di effettuare una co-animazione Adams-Marc:
CASO 2
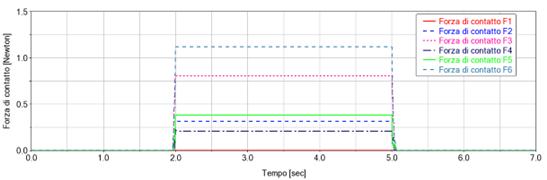
Il secondo esempio studiato descrive, oltre al movimento nello spazio, l’azione di rilascio del corpo su di una superficie posta alla stessa altezza della configurazione di presa. Per semplicità, in questo caso, la mano è stata posta direttamente in prossimità dell’oggetto così da effettuare immediatamente la presa. La superficie finale viene raggiunta tramite una successione di traslazioni. Raggiunta la base il corpo rettangolare viene rilasciato e la protesi si allontana dalla zona di rilascio. Analizzando le forze di contatto si evince che gli andamenti sono simili al Caso 1. Al secondo 5 inizia la fase di rilascio del rettangolo e quindi le forze di contatto diminuiscono fino ad annullarsi. Per quanto riguarda il FEM, durante la fase di presa e spostamento è presente uno stato di stress che si annulla in seguito al rilascio sulla superficie di appoggio finale. La presenza di piccoli valori di stress dipende dal fatto che nell’istante di rilascio l’oggetto risente del coefficiente d’attrito presente sulla superficie di appoggio pari a 0.8.
La sequenza del movimento è stata sintetizzata utilizzando alcuni frame del video prodotto a seguito della co-simulazione:
I risultati ricavati rappresentano una prima validazione numerica e test delle capacità computazionali, anche se in prima istanza non è stato effettuato un riscontro sperimentale. Sviluppi futuri saranno orientati ad un incremento della complessità del modello, introducendo nuovi aspetti e rendendolo ancor più aderente alla realtà. Aspetti da analizzare riguardano l’introduzione di: elementi flessibili, sistemi di controllo o sensori, contatto sull’intera mano e non solo sulle dita, investigando movimenti errati che producono failure. Le potenzialità di questa nuova tecnologia sono molteplici e guardano un ampio palcoscenico di applicazioni sia in campo industriale che non.
Autore: Federica Marricco
Relatore: Prof.ssa Erika Ottaviano