ギヤボックス機構の最適化:高性能スポーツカーにおける公差範囲の役割
コンセプトエンジニア Joel Ortis と Hexagon Manufacturing Intelligence 事業部リセラー開発マネージャー Juan Lopezdealda, Sr.

Engineering Reality 2024 年1号
スマートマニュファクチャリングの加速
ギヤボックス機構は、ギヤシフトの品質と効率を制御します。これは車両の速度、加速、燃費に影響を与え、車両の性能に大きな影響を与えます。
さまざまな公差範囲をテストするために特殊なツールを使用することで、車両の応答性を改善し、全体的な製造コストを削減することに役立ちます。
設計変数のアセンブリの応答に対する影響の解析
構成部品の荷重許容範囲は設計仕様により決まりますが、特定の作動のために構成部品を1 つの機構内に組み立てる場合、連鎖に沿って相対運動が起こり、予期しない変位 (より高いまたは低い) を生じる可能性があるため、精度が重要です。
「この解析戦略を使用して、チームは潜在的な不具合を迅速に特定し、それに応じて公差範囲を調整しました。これにより、機構の応答が改善され、全体的な製造コストを削減するための修正が可能になりました。」
その機構における予想される運動精度要件は、製造プロセス内の通常の変動を含む、各構成部品の製造精度に依存します。
アセンブリは異なる応答を有しているため、適切なシステム機能に従ってそれらを修正するために各設計変数の影響を知ることが重要であり、そうすることで、常に各アセンブリ機構の適切な機能を確保することができます。
ギヤボックス管理システムの構成部品の相互作用を最適化
私たちは仮想プロトタイプを使用して、一連の構成部品の公差範囲の感度を調査しました。問題となった構成部品は、ギヤボックス制御システムの一部として設計された運動機構の連鎖のペアでした。
高性能スポーツカーの品質を高めるには、スムーズで正確な制御機構とギヤボックスのシフト速度が重要です。
図 1 は 2 つの構成部品を示しています。黄色の構成部品は、ギヤスピードの位置を得るために青色の構成部品を正確な位置に導きます。結果として生じる運動は、9 つの構成部品からなる連鎖とそれらの間に相対運動があるシフト制御システムのサブアセンブリによるものです。
理想的には、7 速から 6 速にシフトするとき、青色の構成部品は意図された軌跡に従う必要があります。
青色の構成部品がガイドの先端を越えている場合、運転者は 6 速に向けて動き続けることができます。この現象は「部分的ブロックアウト」と呼ばれます。
ただし、運転者がシフトレバーを 7 速から 6 速に動かすことができない場合は、「全体的ブロックアウト」と呼ばれます。これは最悪の結果です。シフトを完了するには、黄色の構成部品が青色の構成部品をブロックしないように、運転者は少し後方に動かす必要があります。
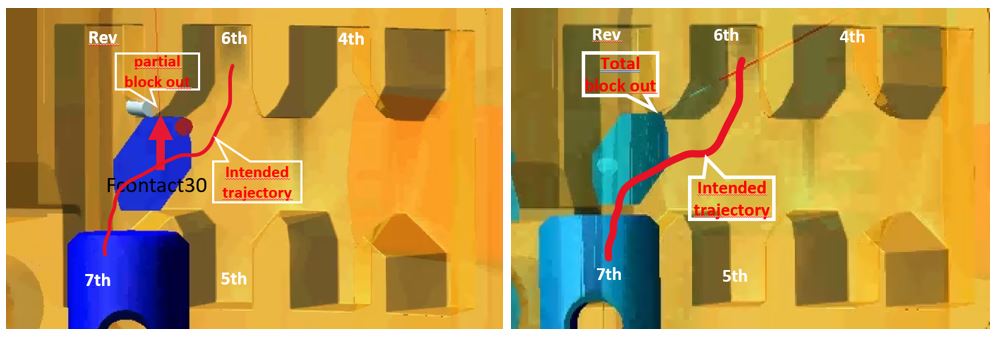
図1 部分的/全体的なブロックアウトと意図された軌跡。
戦略的機構解析:Adams と ODYSSEE CAE による機能的応答の強化
運動が全体的ブロックアウトにつながらないようにするためには、連鎖の構成部品の正しい公差範囲に収まるような適切な設計考慮が重要です。
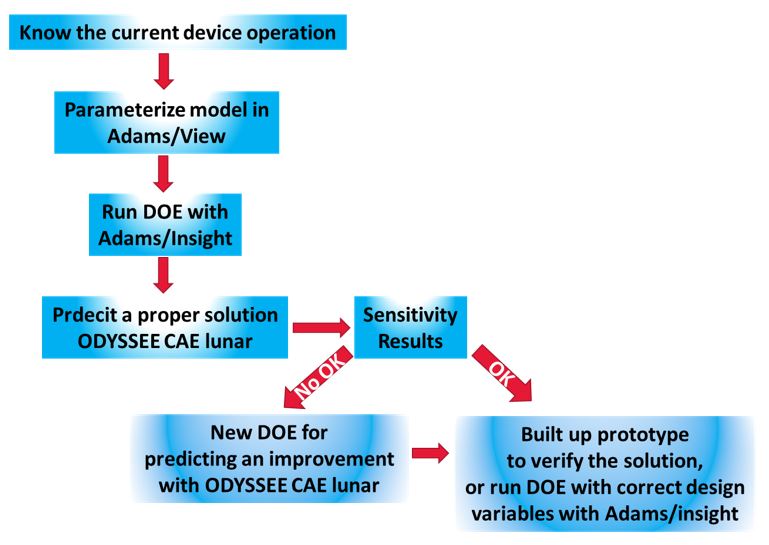
図 2 一般的な解析手順
Adams ソフトウェアは、機構の挙動を検討し、設計目標を定義し、 Adams/Insight を使用して以前の実験計画法 (DOE) 研究を実行することを可能にします。これにより、ODYSSEE CAE Lunar への入力として使用できるデータマトリクスが生成されます。このソフトウェアは、データから学び、設計仕様に従って新しい設計変数の新しい結果を予測するために使用できます。
さらに、Adams/Insight 解析で選択された以前の範囲に含まれている場合、システムの最後の解析段階で新しい変数範囲を割り当てることができます。ODYSSEE CAE からの感度結果が実装されると、より低いコストでより優れた機能的応答ソリューションを得るために、新しい変数範囲を持つ新規の DOE を作成することができます。
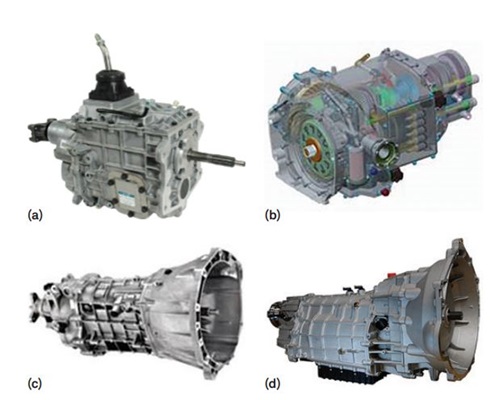
図 3 トランスミッション (a) 全体図 (b) 内部構造 (c) 実際の部品 (d) 外面。
最後に、このプロセスを繰り返して Adams 内で新しいプロトタイプと DOE を作成し、より広い設計変数範囲をカバーし、新規の DOE を構築することができます。
動作中のすべての機構の公差範囲は正確に定義されます。すべての可動機構の公差範囲は慎重に定義されます。しかしながら、2 つの構成部品が完璧に単独で相互作用しても、連鎖における複数の対を有するこれらの組み合わせの効果は蓄積し、全体的な運動と機能性を変化させ、大小の線形変位またはは角変位を引き起こします。
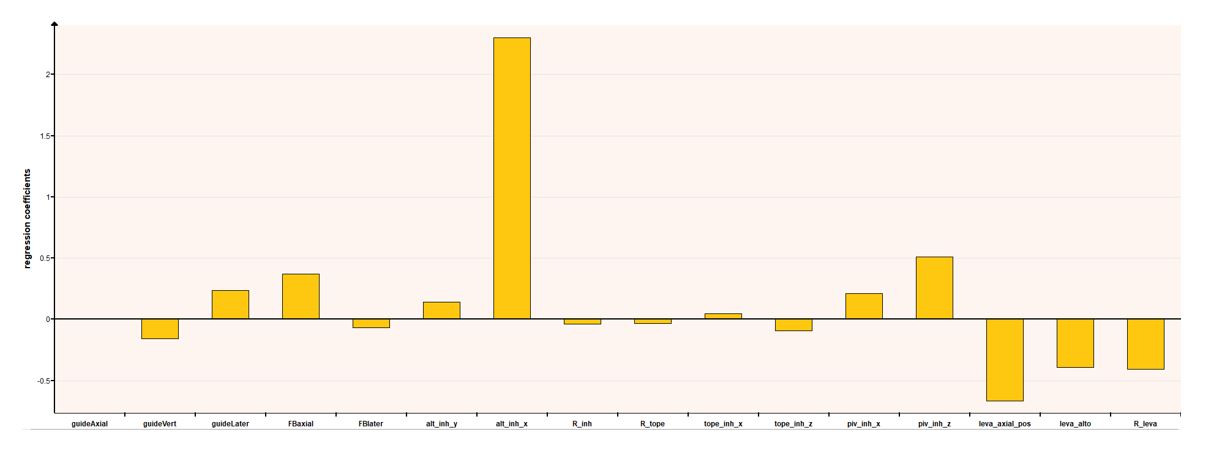 図 4 感度測定結果
図 4 感度測定結果
包括的な公差のバリエーション:連鎖の完全性の最適化
図 2 に示す手順に従って、個々の効果が連鎖に沿って蓄積される場合の公差範囲の効果を判定するために、機構の特定の事例を解析した
Adams/View による最初のシミュレーションでは、すべての構成部品の機能が呼び寸法で表示されました。
Adams/Insight を使用した DOE の公差範囲を含む第 2 のシミュレーションは、機構の各構成部品の公差範囲に沿った応答を特定するために実施されました。結果から、いくつかの不具合事例が明らかになりました。
これらの結果は、設計変数の組み合わせに対する応答を示すために、ODYSSEE CAE lunar ソフトウェアへの入力データとして使用されました。また結果は、各公差範囲または設計変数の感度結果を示しました(図 4) 。
ODYSSEE CAE でこれらの感度結果を使用して新しい DOE を作成することができました。3 つの公差範囲を 40% 減少させ、5 つの公差範囲を 33% 増加させ、4 つの公差範囲を倍増させました。
これらの変更により、以前の設計と比較して部分的なブロックアウトが 8% 減少しました。
これらの許容誤差の変更により、製造コストも削減されます。この場合、5 つの公差範囲を 33% 増加させ、4 つの公差範囲を 100% 増加させました。この新しい解析の反復時間は 2 分未満でしたが、Adams/Insight の反復時間は約「10 解決時間」でした。最初の反復では、結果を入力データとして ODYSSEE CAE に提供し、そこから各公差範囲に応じた機構の挙動を学習しました。
これにより、感度結果に従って ODYSSEE 内の新しい DOE で定義された新しい公差範囲の応答を予測することが可能になりました。一部の公差範囲は値が増加し、応答にほとんど影響を与えなかったことを示しています。その他は値が低下し、応答にいくらか影響を与えたことを示しています。
最適な機能性を達成し、製造コストを削減
チームは迅速に解決策に到達し、公差範囲を変更することでさまざまな事例を通して迅速に反復することができました。
この解析戦略を使用することで、製造コストを削減することができました。これは、チームが応答に最小限の影響を与えた場合にのみ、公差範囲を拡大したからです。
チームは、応答に関係する公差範囲のみを減らして、機構の機能に影響を与えました。これにより、最適な機能性を低コストで得るための最適な機構を定義することができました。