Введение в координатную метрологию
Основные принципы КИМ: Система координат
Свяжитесь с нами
Координатно-измерительная машина (КИМ) работает почти точно так же, как ваш палец, когда вы двигаете им по координатным линиям карты; три оси машины образуют ее систему координат. Вместо пальца КИМ использует датчик для измерения точек на детали. Каждая точка на детали уникальна с точки зрения системы координат машины. КИМ объединяет измеренные точки, формируя элемент детали, который может быть соотнесен с другими ее элементами:
Система координат: Система координат машины
В мире измерений используют два типа систем координат. Первый тип называется машинная система координат. В ней оси X, Y и Z соответствую перемещениям машины. Если смотреть на машину спереди, ось X будет направлена слева направо, ось Y -- спереди назад и ось Z направлена вверх и вниз, перпендикулярно другим двум.Система координат: Система координат детали
Перед вводом в компьютер для измерения координат детали физически выравнивают параллельно осям машины, чтобы координатные системы машины и детали стали параллельными друг другу. Это очень длительная и не очень точная процедура. Если деталь круглая или имеет сложный контур, а не квадратная или прямоугольная, задача измерения становится почти невозможной.
Система координат: Что такое выравнивание?
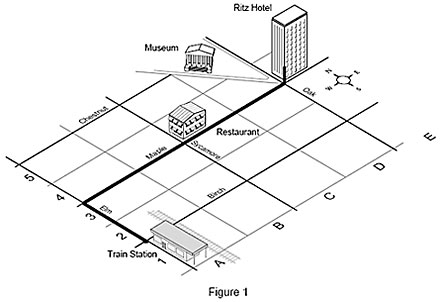
Процесс сопоставления двух систем координат называется выравниванием. В случае карты улиц мы делаем это автоматически, поворачивая карту таким образом, чтобы она была параллельна улице (опорной линии), или по направлению компаса (например, на север). Проделав это, мы, таким образом, определяем свое положение в "мировой системе координат".
Что такое опорный элемент?
Опорный элемент -- это место. Мы используем опорный элемент, чтобы показать местоположение или направление движения к заданному месту. На карте отель Ритц является опорным элементом. Такими же элементами являются улицы, железнодорожная станция, музей и ресторан. Таким образом, используя точку начала координат, опорные элементы, направления и расстояния, люди могут получить любую информацию, необходимую для того, чтобы добраться из одного места в другое.Например, чтобы добраться от железнодорожной станции (начало координат) до ресторана, нужно пройти два квартала на север до Эльм-стрит (опорная линия), повернуть направо и пройти два квартала на восток по улице Мейпл (опорная линия).
В метрологии опорное значение может быть элементом детали, например, отверстием, поверхностью или щелью. Мы измеряем деталь, чтобы определить расстояние от одного элемента до другого.
Что такое трансляция?
Предположим, вам нужно узнать, на каком расстоянии находится данный элемент детали от другого элемента? Возьмем, например, расстояние до центра каждого из четырех отверстий относительно центрального отверстия. Чтобы найти эти расстояния, вам необходимо вначале измерить центральное отверстие, переместить начало координат в центр этого отверстия и затем измерить каждое из окружающих отверстий. Перемещение отправной точки измерения (начала координат) из ее текущего положения в другое место на детали называется трансляцией. КИМ выполняет это математически, когда вы запускаете процедуру выравнивания из пакета программного обеспечения измерения геометрических параметров.В терминах карты улиц, если вы добрались до своего отеля и решили пообедать в легендарном ресторане в этот свой визит в город, вам необходимо отыскать его на карте. Отель теперь стал вашей новой отправной точкой, точкой начала координат. Зная ваше местоположение, вы можете сказать, глядя на карту, что вы должны пройти два квартала на запад по Мэйпл-стрит, чтобы дойти до ресторана.
Что такое вращение?
Не все опорные элементы располагаются под прямым углом по отношению друг к другу. Например, если взглянуть на карту улиц, можно увидеть, что музей расположен на улице, которая не параллельна и не перпендикулярна к улицам, на которых расположены отель, ресторан и железнодорожная станция. Таким образом, чтобы определить расстояние от отеля до музея, необходимо вначале транслировать точку начала координат в местоположение отеля, а затем повернуть ось координат так, чтобы она стала параллельной улице, на которой расположен музей. Теперь расстояние от музея до отеля можно будет измерить с легкостью.
Измеренные и сконструированные элементы
Другие элементы, такие как расстояние, симметричность, пересечение, угол или проекция не могут быть измерены непосредственно, но должны быть построены математически из измеренных ранее элементов. Такие элементы называют сконструированными. На рисунке 11 окружность на осевой линии построена на основании точек центров четырех измеренных окружностей.
Сконструированные элементы
Что такое объемная компенсация
Координатно-измерительные машины ничем не отличаются в этом отношении от других изделий. Несмотря на то, что они созданы с предельно низкими допусками, в их конструкции присутствуют ошибки (крена, тангажа, рыскания, отклонения от прямолинейности и ошибки шкал), которые оказывают влияние на их точность. Поскольку производственные допуски становятся все более жесткими, необходимо, чтобы КИМ становились все более точными.
Большая часть погрешностей КИМ может быть скорректирована автоматически с помощью компьютера. После того как все геометрические ошибки КИМ измерены (это называется картой ошибок), их можно минимизировать или даже устранить с помощью мощных программных алгоритмов КИМ. Такая технология называется объемной компенсацией ошибок.
Устраняя ошибки математическими методами, вы снижаете стоимость производства и даете вашим клиентам более высокую производительность за те же деньги.
Объемную компенсацию лучше всего объяснить на примере карты и компаса. Если вы хотите добраться до определенного места, вы должны знать его истинное положение относительно вашего текущего положения (начала координат). Для определения направления движения, или курсового угла, используются компас и карта. Тем не менее, существует разница между истинным и магнитным северным полюсом. Такая разница между двумя полюсами называется склонением, она вызвана неоднородностью магнитного поля Земли. Таким образом, чтобы определить истинное направление из одной точки в другую, к показаниям углового курса компаса следует прибавить или вычесть склонение -- разницу между географическим и магнитным северным полюсам.
На карте показано, что такая разница между истинным и магнитным северным полюсом (3° западной долготы) должна компенсироваться; в противном случае судно отклонится к северо-западу от намеченной цели и может наскочить на мель, прежде чем достигнет конечного пункта.
Координатно-измерительная машина производит подобную компенсацию автоматически, убирая отклонения машины от измерения.
Калибровка щупа. Компенсация положения наконечника
После того как центр и радиус наконечника станут известны, щупом касаются детали, и координаты наконечника математически "смещаются" на величину радиуса щупа до истинного значения положения точки контакта (рисунок 14). Направление смещения автоматически определяется с помощью процедуры выравнивания.
Мы выполняем подобную процедуру, паркуя машину. Чем лучше мы оценим смещение от внешних габаритов машины, тем ближе мы сможем запарковать машину к тротуару.
Проекци
Проекция элемента детали на другой элемент может быть сравнена с созданием традиционной "плоской" карты мира (в проекции Меркатора). Такая плоская карта получается путем проекции земного шара (сферы) на цилиндр.
Минимальное количество точек, требуемое для измерения диаметра окружности, равно трем, но если эти точки находятся не на одинаковом расстоянии от края отверстия, измеренный диаметр будет диаметром эллипса. Чтобы избежать такое неверное представление, данные измерения проецируются на плоскость, перпендикулярную центральной оси цилиндра. Результатом будет точное определение размера этого элемента детали.
Эффективное выполнение контактных измерений
Правильно используя технологию контактных измерений при инспектировании детали, можно избежать множество распространенных причин возникновения ошибки измерения.Например, измерения щупом должны выполняться по возможности перпендикулярно к поверхности детали. Контактные щупы, используемые в координатно-измерительных машинах, имеют конструкцию, позволяющую добиваться оптимальных результатов, когда наконечник щупа касается детали перпендикулярно корпусу щупа. В идеале, чтобы избежать проскальзывания наконечника щупа, нужно совершать касания внутри конуса ±20° вокруг перпендикуляра. Проскальзывание порождает недостоверные, неповторяемые результаты.
Поверхности детали, измеряемые контактным щупом
Эффективное выполнение контактных измерений

Эффективное выполнение контактных измерений
Вы можете уменьшить вероятность проскальзывания путем уменьшения диаметра наконечника, увеличивая зазор между шаром/стержнем и поверхностью детали. В общем случае, чем больше диаметр наконечника щупа, тем глубже может проникнуть щуп, прежде чем он коснется поверхности детали. Это называется эффективной рабочей длиной датчика (рисунок 21). Кроме того, чем больше наконечник, тем меньше он оказывает влияние на состояние поверхности детали, поскольку точка контакта будет занимать большую площадь на поверхности измеряемой детали. Тем не менее, размер наконечника, который можно использовать, ограничен размером самых маленьких измеряемых отверстий.
GD&T
геометрическое определение размеров и погрешностей, GD&T-- универсальный язык символов, больше похожий на международную систему дорожных знаков, предписывающих водителю, как им двигаться по дороге. Символы GD&T позволяют инженеру-проектировщику точно и логически описать характеристики детали в том порядке, в каком они должны быть выполнены и проверены. Значки GD&T представлены в окне элементов управления параметрами. Окно элементов управления похоже на предложение, которое может быть прочитано слева направо. Например, показанное на иллюстрации окно элементов управления можно прочитать так: Квадратная форма 5 мм (1) контролируется с общей (2) погрешностью профиля (3) величиной 0,05 мм (4), относительно первичного A (5) и вторичного опорного элемента B (6). Форма и допуски определяют ограничения колебаний размеров при изготовлении.
Эти геометрические символы подобны символам, используемым на картах для указания таких элементов, как двухполосные и четырехполосные шоссе, мосты и аэропорты. Они похожи на новые международные знаки дорожного движения, которые все чаще можно увидеть на дорогах США. Цель этих символов состоит в том, чтобы сформировать язык, понятный всем.
Символы геометрических параметров
Прямолинейность -- все точки находятся на прямой линии; допуск определяется зоной, образованной двумя параллельными линиями.
Плоскостность -- все точки на поверхности находятся в одной плоскости; допуск определяется зоной, образованной двумя параллельными плоскостями.
Округлость, или правильная круглая форма -- все точки на поверхности лежат по кругу. Допуск определяется зоной, ограниченной двумя концентрическими кругами.
Цилиндричность -- все точки на поверхности вращения равноудалены от общей оси. Допуск цилиндрический формы определяется как зона погрешности, ограниченная двумя концентрическими цилиндрами, внутри которой должна находиться заданная поверхность.
Профиль --
метод контроля допуска неправильных поверхностей, линий, дуг и нормальных сечений. Профили могут применяться к элементам из отдельных линий или к целой поверхности детали. Допуски профиля определяют равномерную границу вдоль истинного профиля, внутри которой должны находиться все элементы поверхности.
Угловое несогласие, перекос -- положение поверхности или оси под заданным углом (кроме 90°) относительно базовой плоскости или оси. Зона допуска определяется двумя параллельными плоскостями под определенным углом к базовой поверхности или оси.
Перпендикулярность -- положение поверхности или оси под прямым углом относительно базовой плоскости или оси. Допуск по перпендикулярности определяется следующим образом: зона, определяемая двумя плоскостями, перпендикулярными к базовой плоскости или оси, или зона, определяемая двумя параллельными плоскостями, перпендикулярными к базовой оси.
Параллельность -- положение поверхности ли оси, равноудаленной во всех точках от базовой плоскости или оси. Допуск параллельности определяется следующим образом: зона, определяемая двумя плоскостями или линиями, параллельными базовой плоскости или линии, или зона допуска в форме цилиндра, чья ось параллельна базовой оси.
Концентричность -- оси всех пересекающихся элементов поверхности вращения совпадают с осью базового элемента. Допуск концентричности определяется как зона допуска в форме цилиндра, чья ось совпадает с базовой осью.
Положение -- погрешность положения определяется зоной, в которой допускается отклонение центральной оси или центральной плоскости от ее истинного (теоретически точного) положения. Базовые размеры устанавливают истинное положение относительно базовых элементов и между взаимосвязанными функциями. Допуск по положению -- это общее допустимое отклонение в положении элемента относительно точного положения. Для цилиндрических элементов, таких как отверстия и наружные диаметры, допуск положения в общем случае -- это диаметр зоны допуска, внутри которой должна находиться ось данного элемента. Для элементов, не имеющих круглой формы, таких как щели или выступы, допуск положения определяется как суммарная ширина зоны допуска, в которой должна находиться центральная плоскость данного элемента.
Кольцевое биение -- предусматривает контроль круглых элементов поверхности. Допуск применяется независимо к любой точке, измеренной на окружности, если деталь имеет форму вращения на 360 градусов. Допуск на кольцевое биение применяется к плоскостям, построенным вокруг базовой оси, и контролирует суммарные отклонения округлости и соосности. Будучи примененным к поверхностям, построенным под прямым углом к базовой оси, он контролирует круглые элементы на плоскости.
Суммарное биение -- осуществляет суммарный контроль всех элементов поверхности. Допуск применяется одновременно к круглым и продольным элементам, если деталь вращается на 360 градусов. Суммарное биение контролирует суммарное отклонение от округлой, цилиндрической, прямолинейной формы, соосность, расположение под углом, конусность и профиль, если применяется к поверхностям, образуемым в результате вращения вокруг базовой оси. Если допуск применяется к поверхностям, построенным под прямым углом к базовой оси, то он контролирует суммарные отклонения перпендикулярности и плоскостности.