Usinage WORKNC Robot
WORKNC intègre le module WORKNC Robot pour la simulation et la modification de trajectoires d’outils, ce qui permet de contrôler tous les types de robots. WORKNC Robot utilise toute la portée des trajectoires d'outils WORKNC pour les opérations d’usinage, de trempe des bords, de soudage et de polissage.

Programmation facile, rapide et précise pour les applications robotisées
WORKNC Robot vous permet de simuler et d’éditer des trajectoires d’outil pour une vaste gamme de robots.
Vous voulez en savoir plus ?
Capacités produit
Vue d’ensemble des fonctionnalités :
- Module intégré
- Gestion de tous les éléments de cellule
- Détection et gestion des collisions
- Détection et gestion de la singularité
- Position robot complémentaire
- Postprocesseur personnalisé pour toutes les applications
- Prépositionnement du robot au premier point
- Orientation prédéfinie de la tête
- Gestion complémentaire des axes linéaires ou de rotation.
Simple d’utilisation
L’interface utilisateur graphique de WORKNC Robot permet une programmation facile, rapide et précise et donc la création de parcours complexes pour tous les types de matériaux et de machines. Avec ce processus de programmation simple, les fabricants peuvent exploiter tout le potentiel de leurs robots.
Toutes les stratégies WORKNC (3, 3+2 ou 5 axes simultanés) peuvent être utilisées pour toutes les tâches de fabrication, telles que le fraisage, la découpe de pièces, avec l’équipement disponible dans l’atelier.
WORKNC Robot remplace le cycle d’apprentissage point par point pour la découpe ajustée de pièces.
Exigences spécifiques
Aujourd’hui, WORKNC offre des solutions qui dépassent le domaine du fraisage.
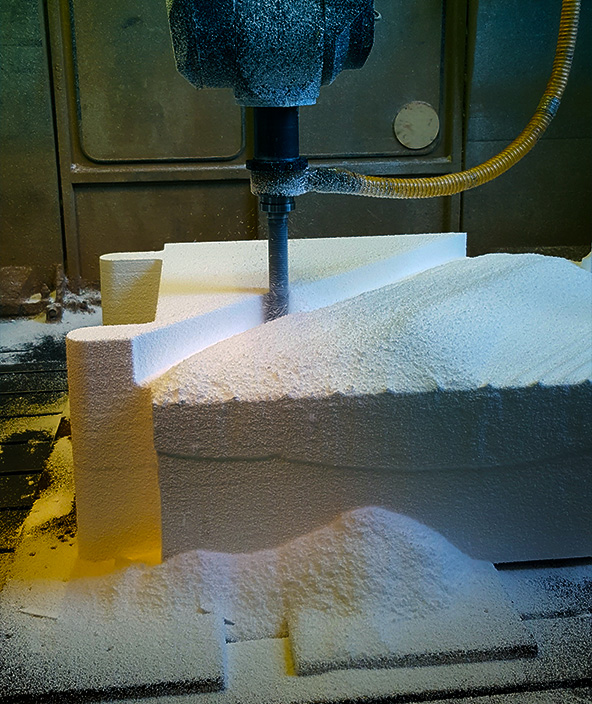
Le durcissement des bords d’outils d’emboutissage contrôlé par WORKNC permet d’automatiser ce processus, souvent effectué manuellement, et de monter des têtes laser pilotes sur des fraiseuses CN ou des robots.
WORKNC Robot génère des trajectoires sur des formes géométriques complexes (maillages STL ou surfaces Nurbs) qui peuvent être personnalisées pour le soudage au laser ou au chalumeau.
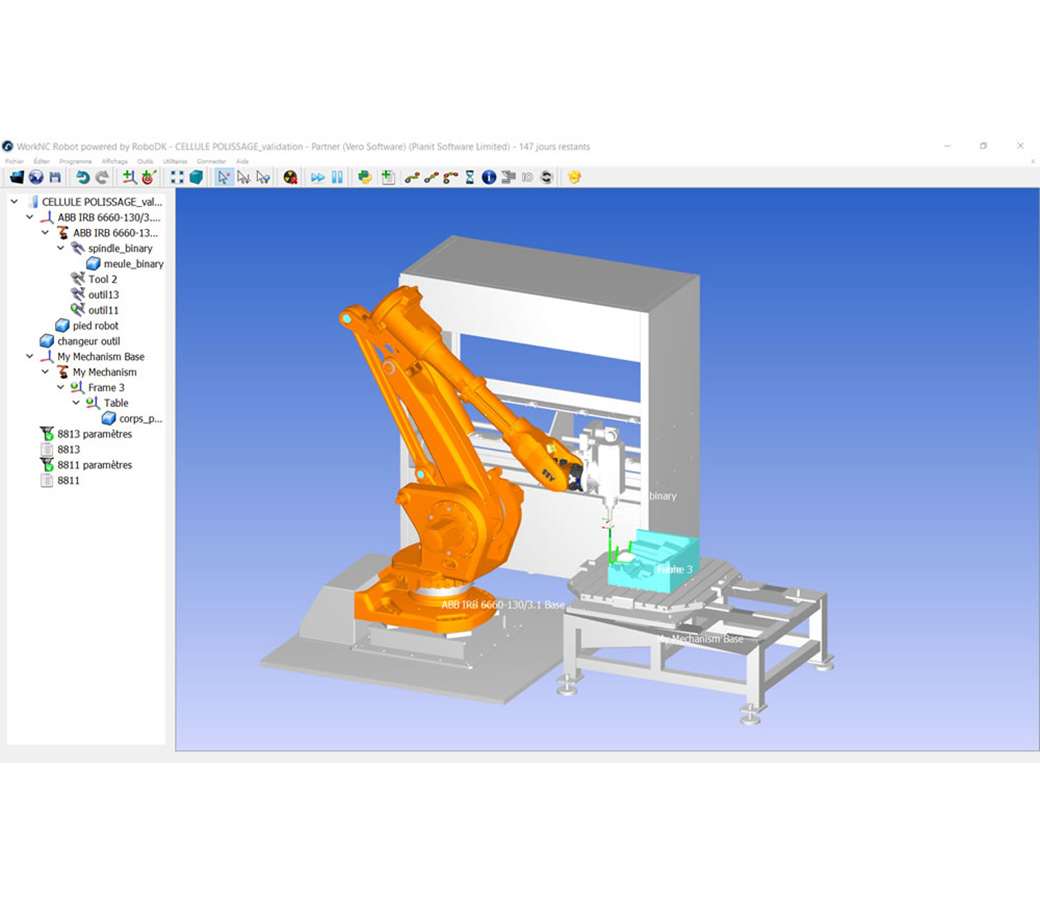
Les mouvements « complexes » du robot nécessitent un modèle CAO précis de la cellule robotisée afin de détecter les collisions éventuelles entre différents éléments, tels que le robot, le réservoir du changeur d’outils, la table ou d’autres supports, les axes supplémentaires et les barrières de sécurité.
Optimisation de la trajectoire – singularité
Les trajectoires peuvent provoquer des problèmes de singularité dans les poignets et les bras des robots. WORKNC Robot peut détecter automatiquement les conditions de singularité potentielles dans les trajectoires et les signaler aux opérateurs afin qu’ils puissent prendre les mesures appropriées.
La simulation dans l’application Robot permet d’optimiser les mouvements du robot. Le module propose des configurations de robot ou des positions complémentaires pour optimiser les trajectoires.
Une haute précision de trajectoire garantit des produits finis de qualité supérieure.
Différents procédés ou configurations de cellule
Robots montés sur outil
Une configuration de cellule robotisée montée sur outil permet l’usinage ou diverses opérations sur des pièces très grandes et lourdes.
Ce processus offre la possibilité de changer d’outils ou d’équipement d’usinage sur le robot grâce à l’utilisation d’un changeur d’outils. Plusieurs outils peuvent être positionnés simultanément sur la tête du robot.
Robots montés sur pièce
Ce type de solution est proposé pour la production en série de petites pièces limitée par les capacités de robot.
Ce processus permet de contrôler les cellules automatisées depuis le chargement des ébauches sur un convoyeur jusqu’à la fin de l’usinage et la remise en place des pièces sur le convoyeur.
WORKNC Robot peut piloter tout type de robot de 4 à 7 axes ainsi que des axes supplémentaires, tels que des plateaux tournants, des robots sur rails, des portiques à 3 axes linéaires, etc.
WORKNC Robot propose une bibliothèque de 250+ machines existantes, parmi plus de 22 fournies.
Types de robot
WORKNC Robot peut être adapté à toutes les marques de robots.
Le postprocesseur WORKNC Robot, configurable en fonction des installations de production, crée des programmes pilotant tous types de robots en tenant compte de tous les paramètres possibles grâce à un simulateur spécifique dédié à chaque automate :
STAUBLI (VAL3, version 6 et 7)
ABB
FANUC
YASKAWA_Motoman
KUKA