WORKNC Robot Machining
WORKNC integriert das Modul WORKNC Robot für die Werkzeugwegsimulation und -bearbeitung und erlaubt damit die Steuerung von Robotertypen aller Art. WORKNC Robot greift auf den gesamten Umfang der in WORKNC vorhandenen Werkzeugwege für das Fräsen, Härten, Schweißen und Polieren zu.

Einfache, schnelle und präzise Roboteranwendung
Mit WORKNC Robot können Sie Werkzeugwege für eine Vielzahl von Robotern simulieren und bearbeiten.
Möchten Sie hierzu weitere Informationen erhalten?
Produktfunktionen
Funktionen auf einen Blick:
- Integriertes Modul
- Management aller Elemente in der Zelle
- Kollisionserkennung und -verwaltung
- Erkennung und Verwaltung von Singularitäten
- Komplementäre Roboterposition
- Kundenspezifischer Postprozessor für alle Anwendungen
- Vorpositionierung des Roboters am Einmesspunkt
- Vordefinierte Roboterkopf-Ausrichtung
- Ergänzende Verwaltung der Linear- oder Rotationsachsen
Benutzerfreundlich
Die grafische Benutzeroberfläche von WORKNC Robot überzeugt mit einfacher, schneller und präziser Programmierung, mithilfe derer sich komplexe Werkzeugwege für Werkstoffe und Maschinen aller Art erstellen lassen. Dank dieser einfachen Programmierprozesse gelingt es Herstellern, das Potenzial ihrer Roboter voll auszuschöpfen.
Alle WORKNC-Strategien (3, 3+2 oder 5-Achsen-Simultan) sind für die unterschiedlichsten Fertigungsaufträge wie Fräsen und Teilezuschnitt etc. auf den im Fertigungsbereich bereits vorhandenen Maschinen nutzbar.
Darüber hinaus entfällt mit WORKNC Robot der Punkt-zu-Punkt-Lernzyklus für den Teilebeschnitt.
Spezifische Anforderungen
Über die Anwendungen der Fräsbearbeitung hinaus bietet WORKNC heute auch Lösungen für andere Bereiche.
Durch die von WORKNC gesteuerte Kantenhärtung des Stanzwerkzeugs kann dieser häufig manuell durchgeführte Prozess durch auf NC-Fräsmaschinen oder -Robotern montierten Pilot-Laserköpfen automatisiert werden.
WORKNC Robot generiert Bewegungsbahnen auf komplexen geometrischen Formen (STL-Netze oder NURBS-Flächen), die sich für das Laser- oder Brennschweißen individuell anpassen lassen.
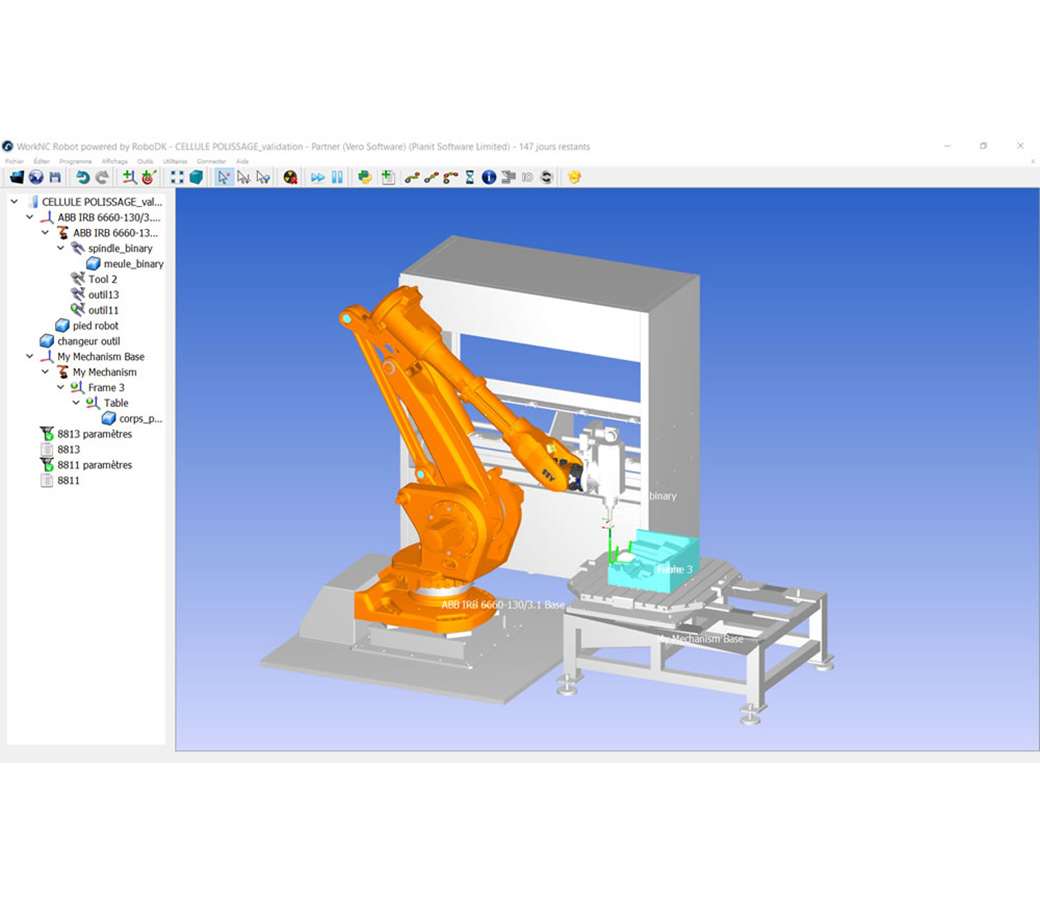
Komplexe Roboterbewegungen erfordern ein präzises CAD-Modell der Roboterzelle, um mögliche Kollisionen zwischen den unterschiedlichen Elementen der Zelle wie dem Roboter, der Werkzeugwechseleinrichtung, dem Tisch oder sonstigen Ablagen, Nebenachsen und Sicherheitsbarrieren zu erkennen.
Optimierung der Bewegungsbahn – Singularität
Bewegungsbahnen können zu Singularitäten in Bezug auf Roboterhandgelenk und -arm führen. WORKNC Robot erkennt anhand der Bewegungsbahnen automatisch potenzielle Singularitäten und warnt den Bediener, sodass entsprechende Maßnahmen ergriffen werden können.
Mithilfe von Simulationen innerhalb des Robot-Moduls lassen sich die Bewegungen des Roboters optimieren. Hierfür bietet das Modul entsprechende Roboterkonfigurationen oder komplementäre Positionen an.
Hochpräzise Bewegungsbahnen sind ein Garant für erstklassige Endprodukte.
Unterschiedliche Zellprozesse oder -konfigurationen
Am Werkzeug montierte Roboter
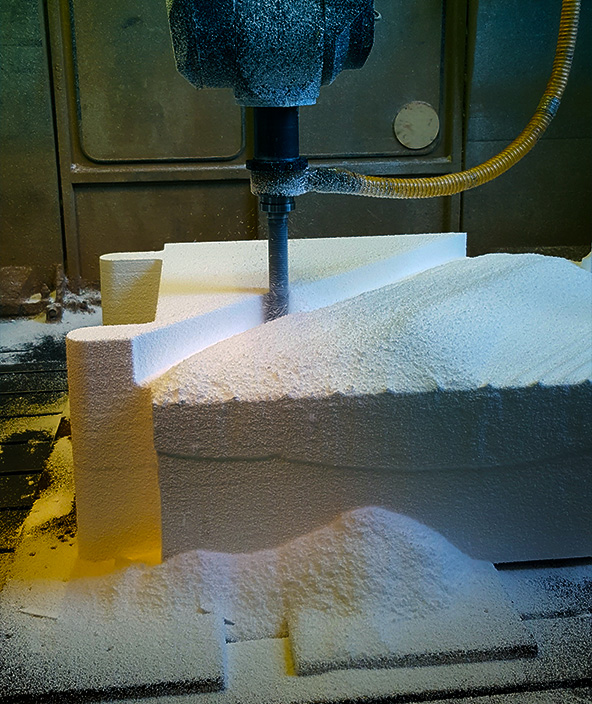
Eine am Werkzeug montierte Roboterzellen-Konfiguration ermöglicht die Bearbeitung oder Anwendung verschiedener Prozesse an sehr großen und schweren Bauteilen.
Dank der Wechseleinrichtung mit Werkzeugmagazin sind Werkzeuge oder Bearbeitungsmaschinen während dieses Prozesses auswechselbar. Auf dem Roboterkopf lassen sich mehrere Werkzeuge gleichzeitig positionieren.
Am Bauteil montierte Roboter
Diese Lösung eignet sich für die aufgrund der Roboterkapazität begrenzte Serienfertigung kleinerer Teile.
Dieser Prozess unterstützt die Steuerung automatisierter Zellen - vom Laden der Rohlinge auf ein Förderband bis hin zur vollständigen Fräsbearbeitung und dem Zurücklegen des Teils auf das Förderband.
WORKNC Robot steuert jeden 4- bis 7-Achsen-Roboter sowie alle Nebenachsen wie Drehtische, schienengeführte Roboter, Portale mit 3 Linearachsen usw.
WORKNC Robot verfügt über eine Bibliothek mit mehr als 250 Maschinen von über 22 Anbietern.
Robotertypen
WORKNC Robot lässt sich an Roboter aller Fabrikate anpassen.
Der entsprechend der Produktionsanlagen konfigurierbare Postprozessor von WORKNC Robot erstellt Programme zur Steuerung von Robotern aller Art unter Berücksichtigung aller denkbaren Parameter. Ermöglicht wird dies mithilfe eines spezifischen Simulators für jede einzelne Steuerung:
STAUBLI (VAL3, Version 6 und 7)
ABB
FANUC
YASKAWA_Motoman
KUKA