Usinagem do WORKNC Robot
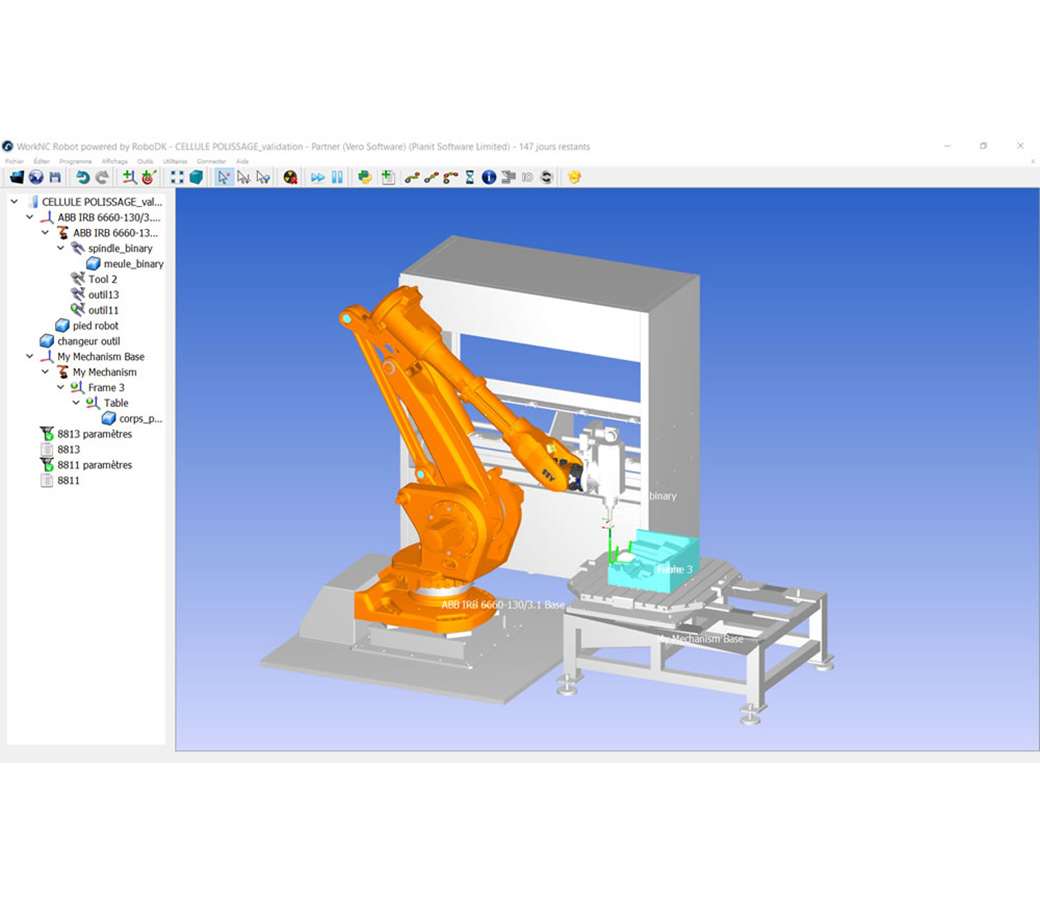
O WORKNC integra o módulo do WORKNC Robot para simulação e edição de trajetórias de ferramentas, possibilitando o controle de todos os tipos de robôs. O WORKNC Robot utiliza a gama completa de trajetórias de ferramenta do WORKNC para operações de usinagem, endurecimento de bordas, soldagem e polimento.

Programação fácil, rápida e precisa para aplicações robóticas
O WORKNC Robot permite simular e editar trajetórias de ferramentas para uma ampla variedade de robôs.
Pronto para saber mais?
Recursos do produto
Resumo dos recursos:
- Módulo integrado
- Gerenciamento de todos os elementos da célula
- Detecção e gerenciamento de colisão
- Detecção e gerenciamento de singularidades
- Posição complementar do robô
- Pós-processador personalizado para todas as aplicações
- Pré-posicionamento do robô no primeiro ponto
- Orientação predefinida do cabeçote
- Gerenciamento complementar do eixo linear ou rotacional.
Fácil de usar
A interface gráfica do usuário do WORKNC Robot oferece um programa fácil, rápido e preciso, resultando na geração de trajetórias de ferramentas complexas para todos os tipos de materiais e máquinas. Esse processo de programação simples permite que os fabricantes percebam todo o potencial de seus robôs.
Todas as estratégias do WORKNC (3, 3+2 ou 5 eixos simultâneos) podem ser empregadas para atender a todas as diversas tarefas de fabricação, como fresagem, corte de peças etc., com o equipamento disponível na oficina.
O WORKNC Robot substitui o ciclo de definição ponto a ponto para a aparagem de peças.
Requisitos especiais
Hoje, além das aplicações de fresagem, o WORKNC oferece soluções em outros campos.
O controle do endurecimento de bordas da ferramenta de estampagem controlada pelo WORKNC permite que esse processo, muitas vezes manual, seja automatizado e que os cabeçotes a laser pilotos sejam montados em fresadoras NC ou robôs.
O WORKNC Robot gera trajetórias em formas geométricas complexas (entrelaçamento STL ou superfícies Nurbs) que podem ser personalizadas para soldagem a laser ou por maçarico.
Os movimentos "complexos" do robô exigem um modelo CAD preciso da célula do robô para detectar possíveis colisões entre diferentes elementos, como o robô, os depósitos do trocador de ferramentas, a mesa ou outros suportes, eixos suplementares e barreiras de segurança.
Otimização da trajetória – singularidade
Trajetórias podem causar problemas de singularidade no pulso e braço do robô. O WORKNC Robot pode detectar automaticamente condições potenciais de singularidade nas trajetórias e alertar o operador para que ele possa tomar a ação apropriada.
A simulação dentro do aplicativo do robô permite otimizar seus movimentos. O módulo oferece configurações de robô ou posições complementares para garantir trajetórias otimizadas.
A alta precisão de trajetória garante produtos acabados de alta qualidade.
Diferentes processos ou configurações de célula
Robôs montados na ferramenta
Uma configuração de célula robótica montada na ferramenta permite a usinagem ou a aplicação de vários processos em peças muito grandes e pesadas.
Este processo oferece a possibilidade de trocar ferramentas ou equipamentos de usinagem no robô graças ao uso de pentes de troca de ferramentas. Várias ferramentas podem ser posicionadas simultaneamente no cabeçote do robô.
Robôs montados em peças
Este tipo de solução é proposto para fins de produção em série de peças menores limitadas pelas capacidades do robô.
Este processo permite o controle de célula automatizada desde o carregamento de peças brutas em uma esteira transportadora até a usinagem completa e colocação da peça de volta na esteira.
O WORKNC Robot pode pilotar qualquer tipo de robô de 4 a 7 eixos, bem como eixos suplementares, como mesas giratórias, robôs montados em trilhos, pórticos com 3 eixos lineares etc.
O WORKNC Robot oferece uma biblioteca com mais de 250 máquinas existentes, de mais de 22 fornecedores.
Tipos de robô
O WORKNC Robot pode ser adaptado para todas as marcas de robô.
O pós-processador do WORKNC Robot, configurável de acordo com as instalações de produção, cria programas que pilotam todos os tipos de robôs, considerando todos os parâmetros possíveis graças a um simulador específico dedicado a cada controlador:
STAUBLI (VAL3, Versão 6 e 7)
ABB
FANUC
YASKAWA_Motoman
KUKA