WORKNC Robot Machining
WORKNC는 툴패스 시뮬레이션 및 편집을 위한 WORKNC Robot Machining을 통합하여 모든 유형의 로봇을 제어할 수 있습니다. WORKNC Robot은 가공 작업, 엣지 경화, 용접 및 폴리싱을 위해 모든 범위의 WORKNC 툴패스를 사용합니다.

로봇 애플리케이션을 위한 쉽고 빠르고 정밀한 프로그래밍
WORKNC Robot을 사용하면 다양한 로봇의 툴패스를 시뮬레이션하고 편집할 수 있습니다.
자세한 내용을 알아 보시겠습니까?
제품 기능
기능 한눈에 보기:
- 통합 베이스
- 모든 셀 요소 관리
- 충돌 감지 및 관리
- 특이점 감지 및 관리
- 상호 보완적인 로봇 위치
- 모든 응용 분야를 위한 맞춤형 후처리 장치
- 첫 번째 지점에서 로봇의 사전 위치
- 사전 정의된 헤드 방향
- 보조 선형 또는 회전축 관리.
사용 편의성
WORKNC Robot의 그래픽 사용자 인터페이스는 쉽고 빠르며 정밀한 프로그래밍을 제공하여 모든 유형의 재료 및 기계에서 복잡한 툴패스를 생성합니다. 이 간단한 프로그래밍 프로세스를 통해 제조업체는 로봇의 잠재력을 최대한 발휘할 수 있습니다.
모든 WORKNC 전략(3, 3+2 또는 동시 5축)은 현장의 장비와 함께 밀링, 부품 절단 등과 같은 다양한 제조 작업을 수행하는 데 투입될 수 있습니다.
WORKNC Robot은 부품 트리밍 시 포인트간 학습 주기를 대체합니다.
특별 요구 사항
현재 WORKNC는 밀링 분야 외에도 다른 분야에 솔루션을 제공하고 있습니다.
WORKNC로 제어하는 스탬핑 공구 엣지 경화를 사용하면 이 공정을 수동으로 수행하고 NC 밀링 기계 또는 로봇에 파일럿 레이저 헤드를 장착할 수 있습니다.
WORKNC Robot은 복잡한 기하학적 형태(STL 메시 또는 Nurbs 표면)의 궤도를 생성하는데, 이는 레이저 또는 토치 용접을 위해 개인화할 수 있습니다.
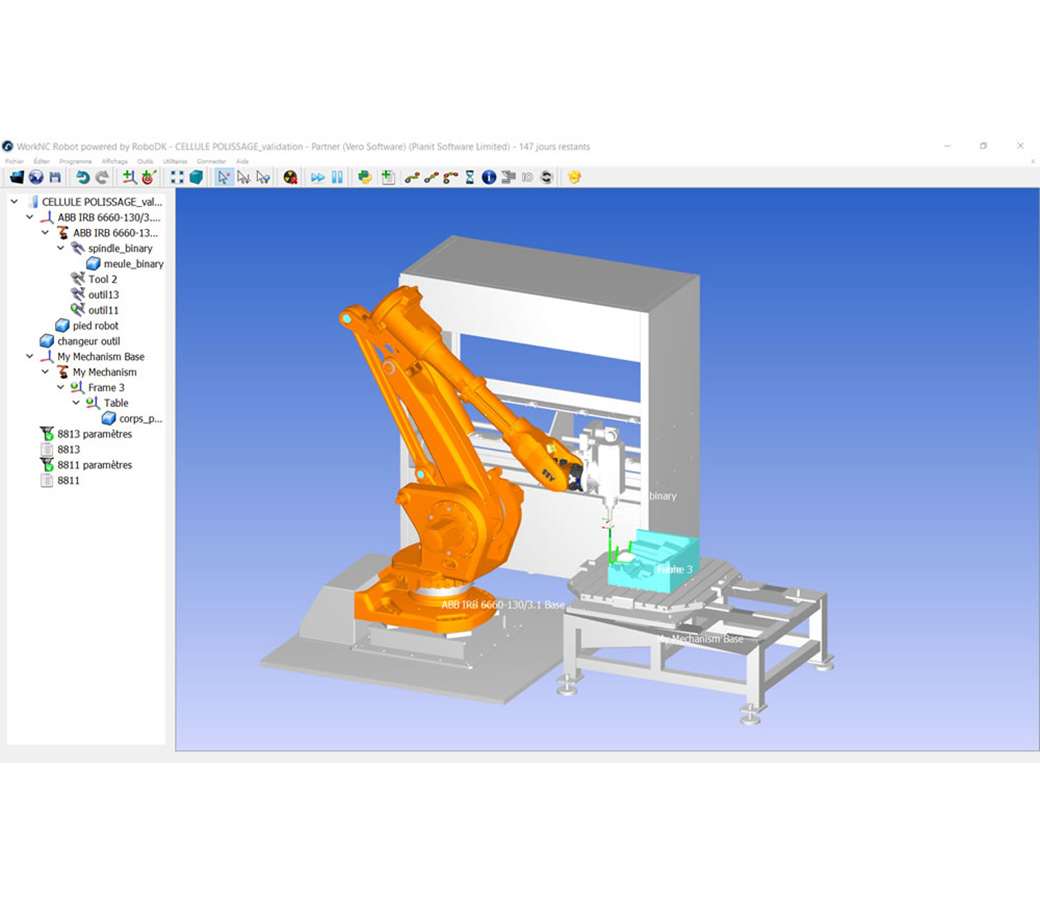
로봇 이동은 '복잡’합니다. 따라서 로봇, 툴 체인저 매거진, 테이블 또는 기타 지지대, 보조 축 및 안전 배리어와 같은 다양한 요소 간의 충돌을 감지하기 위해 로봇 셀의 정밀한 CAD 모델이 필요합니다.
궤적 최적화 - 특이점
궤적은 로봇 관절과 암에 특이점 문제를 일으킬 수 있습니다. WORKNC Robot은 궤적의 잠재적인 특이점 조건을 자동으로 감지하고 작업자에게 경고하여 적절한 조치를 취할 수 있도록 합니다.
로봇 애플리케이션 내부의 시뮬레이션을 통해 로봇의 움직임을 최적화할 수 있습니다. 이 모듈은 최적화된 궤적을 보장하기 위한 로봇 구성 또는 상호보완적인 위치 조정을 제공합니다.
높은 궤적 정밀도는 최고 품질의 완제품을 보장합니다.
다양한 셀 공정 또는 구성
공구 장착 로봇
공구 장착 로봇의 셀 구성을 통해 매우 큰 부품과 무거운 부품에도 다양한 공정을 가공하거나 적용할 수 있습니다.
이 프로세스는 툴 체인저 매거진을 사용하여 로봇에서 공구 또는 가공 장비를 변경할 수 있습니다. 여러 공구를 로봇 헤드에 동시에 배치할 수 있습니다.
부품 장착 로봇
이러한 유형의 솔루션은 로봇 용량에 의한 제한 때문에 소형 부품의 연속 생산용으로 제안합니다.
이 공정은 블랭크를 컨베이어 벨트에 로딩하는 것을 자동화 셀로 제어하여 가공을 완료하고 부품을 컨베이어 벨트에 다시 배치할 수 있습니다.
WORKNC Robot은 회전 테이블, 레일 장착 로봇, 3선형 축을 갖춘 갠트리 등 보조 축뿐만 아니라 4축에서 7축까지 모든 유형의 로봇을 조종할 수 있습니다.
WORKNC Robot은 22개 이상의 기계에서 250개 이상의 기존 기계가 포함된 라이브러리를 제공합니다.
로봇의 유형
WORKNC Robot은 모든 브랜드의 로봇에 맞게 조정할 수 있습니다.
생산 시설에 따라 구성할 수 있는 WORKNC Robot 포스트프로세서는 각 컨트롤러 전용 시뮬레이터를 통해 가능한 모든 파라미터를 고려하여 모든 유형의 로봇을 조종하는 프로그램을 생성합니다.
STAUBLI(VAL3, Version 6 및 7)
ABB
FANUC
YASKAWA_Motoman
KUKA