Lavorazione Robot WORKNC
WORKNC integra il modulo Robot WORKNC per la simulazione e la modifica dei percorsi utensile, consentendo il controllo di tutti i tipi di robot. Robot WORKNC utilizza l'intera gamma di percorsi utensile WORKNC per le operazioni di lavorazione, tempra dei bordi, saldatura e lucidatura.

Programmazione semplice, rapida e precisa per applicazioni robotiche
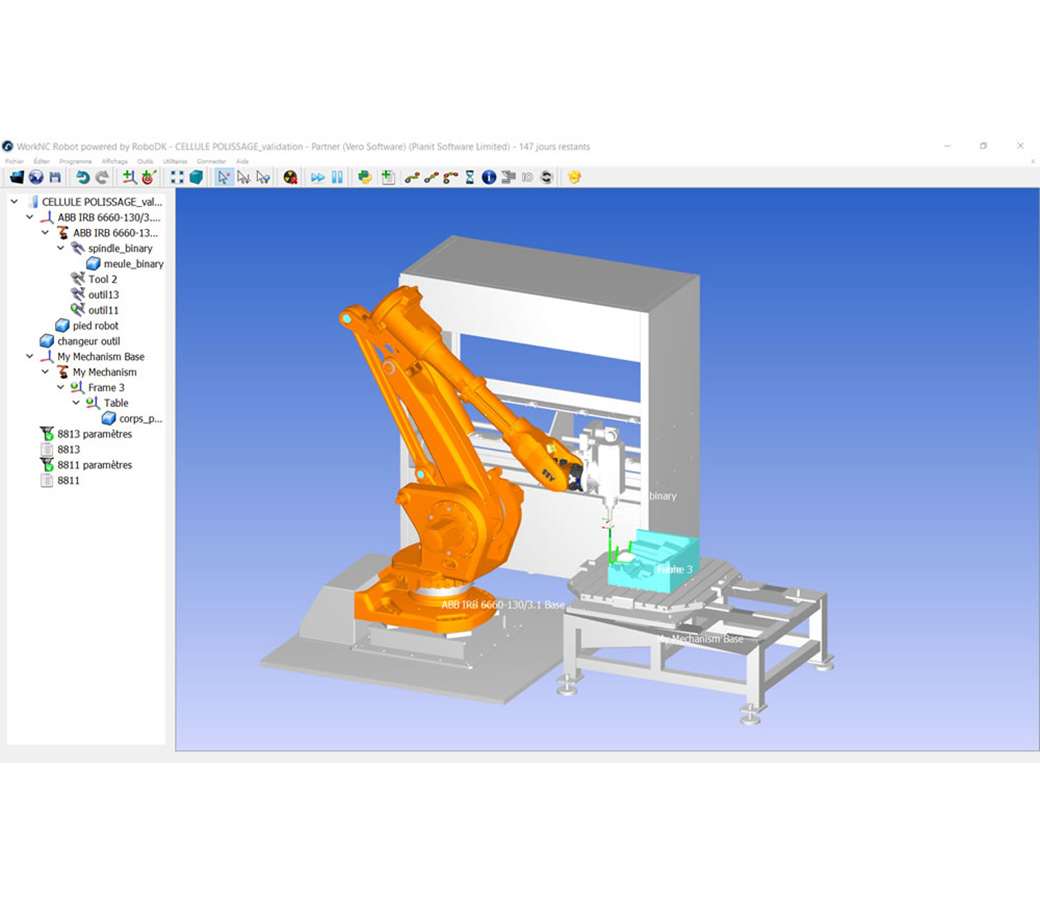
WORKNC Robot consente di simulare e modificare il percorso utensile per un'ampia gamma di robot.
Vuoi saperne di più?
Caratteristiche del prodotto
Caratteristiche:
- Modulo integrato
- Gestione di tutti gli elementi della cella
- Rilevamento e gestione delle collisioni
- Rilevamento e gestione delle singolarità
- Posizione robot complementare
- Postprocessore personalizzato per ogni applicazione
- Preposizionamento del robot nel primo punto
- Orientamento della testa predefinito
- Gestione aggiuntiva dell'asse lineare o rotativo.
Facilità d'uso
L'interfaccia utente grafica di WORKNC Robot consente una programmazione semplice, rapida e precisa che permette di generare percorsi utensile complessi per tutti i tipi di materiali e macchine. Questo semplice processo di programmazione consente ai produttori di realizzare tutto il potenziale dei loro robot.
Tutte le strategie WORKNC (3, 3+2 o 5 assi simultanei) possono essere impiegate per svolgere i vari lavori di produzione come fresatura, taglio di pezzi, ecc., con le attrezzature disponibili in officina.
WORKNC Robot sostituisce il ciclo di apprendimento punto a punto per la rifilatura dei pezzi.
Requisiti specifici
Oggi, oltre alle applicazioni di fresatura, WORKNC offre soluzioni in altri campi.
La tempra dei bordi degli utensili di stampaggio controllata da WORKNC consente di automatizzare questo processo, spesso eseguito manualmente, e di montare teste laser pilota su fresatrici NC o robot.
WORKNC Robot genera traiettorie su forme geometriche complesse (mesh STL o superfici Nurbs) che possono essere personalizzate per la saldatura laser o a torcia.
I movimenti robotici "complessi" richiedono un modello CAD preciso della cella robotica per individuare eventuali collisioni tra diversi elementi, come il robot, il magazzino di cambio strumenti, il tavolo o altri supporti, gli assi supplementari e le barriere di sicurezza.
Ottimizzazione della traiettoria - Singolarità
Le traiettorie possono causare problemi di singolarità nei polsi e nei bracci dei robot. WORKNC Robot è in grado di rilevare automaticamente potenziali condizioni di singolarità nelle traiettorie e avvisare gli operatori in modo che possano adottare le misure appropriate.
La simulazione all'interno dell'applicazione Robot consente di ottimizzare i movimenti del robot. Il modulo offre configurazioni di robot o posizioni complementari per garantire traiettorie ottimizzate.
L'elevata precisione della traiettoria garantisce prodotti finiti di alta qualità.
Processi o configurazioni delle celle diversi
Robot montati su strumenti
La configurazione di una cella robotica montata su strumenti consente la lavorazione o l'applicazione di vari processi su pezzi molto grandi e pesanti.
Questo processo offre la possibilità di cambiare gli strumenti o le attrezzature di lavorazione sul robot grazie all'utilizzo di un magazzino di cambio strumenti. È possibile posizionare contemporaneamente più strumenti sulla testa del robot.
Robot montati su componenti
Questo tipo di soluzione è proposta per la produzione in serie di pezzi di piccole dimensioni limitati dalle capacità dei robot.
Questo processo consente di controllare le celle automatizzate dal caricamento di pezzi sbozzati su un nastro trasportatore fino alla lavorazione completa e alla rimessa del pezzo sul nastro trasportatore.
WORKNC Robot è in grado di pilotare qualsiasi tipo di robot da 4 a 7 assi nonché assi supplementari, come tavole rotanti, robot montati su rotaia, portali con 3 assi lineari, ecc.
WORKNC Robot offre una libreria con oltre 250 macchine in commercio, provenienti da più di 22 fornitori.
Tipo di robot
WORKNC Robot può essere adattato a tutte le marche di robot.
Il postprocessore WORKNC Robot, configurabile in base al tipo di produzione, crea programmi che pilotano tutti i tipi di robot tenendo conto di ogni parametro possibile grazie a un simulatore specifico dedicato a ogni controller:
STAUBLI (VAL3, versione 6 e 7)
ABB
FANUC
YASKAWA_Motoman
KUKA