WORKNC Robot ロボット用加工データ変換とシミュレーション
WORKNC は WORKNC Robot モジュールを統合することで、ツールパスのシミュレーションと編集を提供し、あらゆるタイプのロボットの制御を可能にします。WORKNC Robot は、加工作業、エッジ硬化、溶接、研磨に幅広い WORKNC ツールパスを使用します。

ロボットアプリケーション向けの簡単、高速、正確なプログラミング
WORKNC Robot では、広範囲のロボットのツールパスをシミュレートおよび編集できます。
詳細はこちら
製品機能
特長一覧:
- 統合モジュール
- 全てのセル要素の管理
- 衝突検出と管理
- 特異点検出と管理
- 補完的なロボット位置
- 全てのアプリケーション用にカスタマイズされたポストプロセッサ
- 最初の地点でのロボットの事前位置決め
- あらかじめ定義されたヘッドの向き
- 補足的な直線軸または回転軸の管理
使いやすさ
WORKNC Robotのグラフィックユーザーインターフェイスは、簡単、迅速、正確なプログラミングを提供し、あらゆる種類の材料と機械に対応する複雑なツールパスを生成します。このシンプルなプログラミングプロセスにより、メーカーはロボットの潜在能力を最大限に引き出せます。
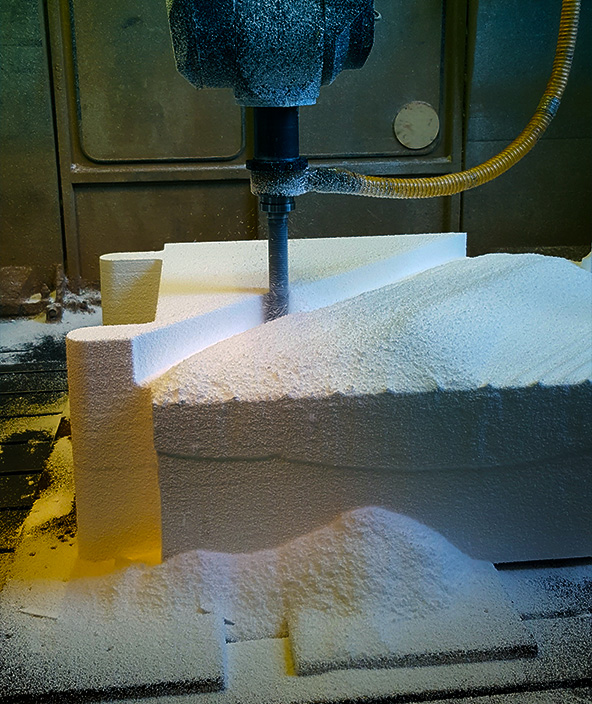
WORKNCの全ての戦略(3軸、3+2軸、同時5軸)は、フライス加工、部品切削など、製造現場で利用可能な設備で、あらゆる製造作業に対応することができます。
WORKNC Robotは、部品トリミングのためのポイントツーポイントの学習サイクルを置き換えます。
固有の要件
今日、WORKNCはフライス加工だけでなく、他の分野でもソリューションを提供しています。
WORKNCによって制御されるスタンピングツールのエッジハードニングは、しばしば手作業で行われるこの工程を自動化し、パイロットレーザーヘッドをNCフライス盤やロボットに取り付けることを可能にします。
WORKNC Robotは、複雑な形状(STLメッシュやNurbsサーフェス)の軌跡を生成し、レーザー溶接やトーチ溶接用にパーソナライズすることができます。
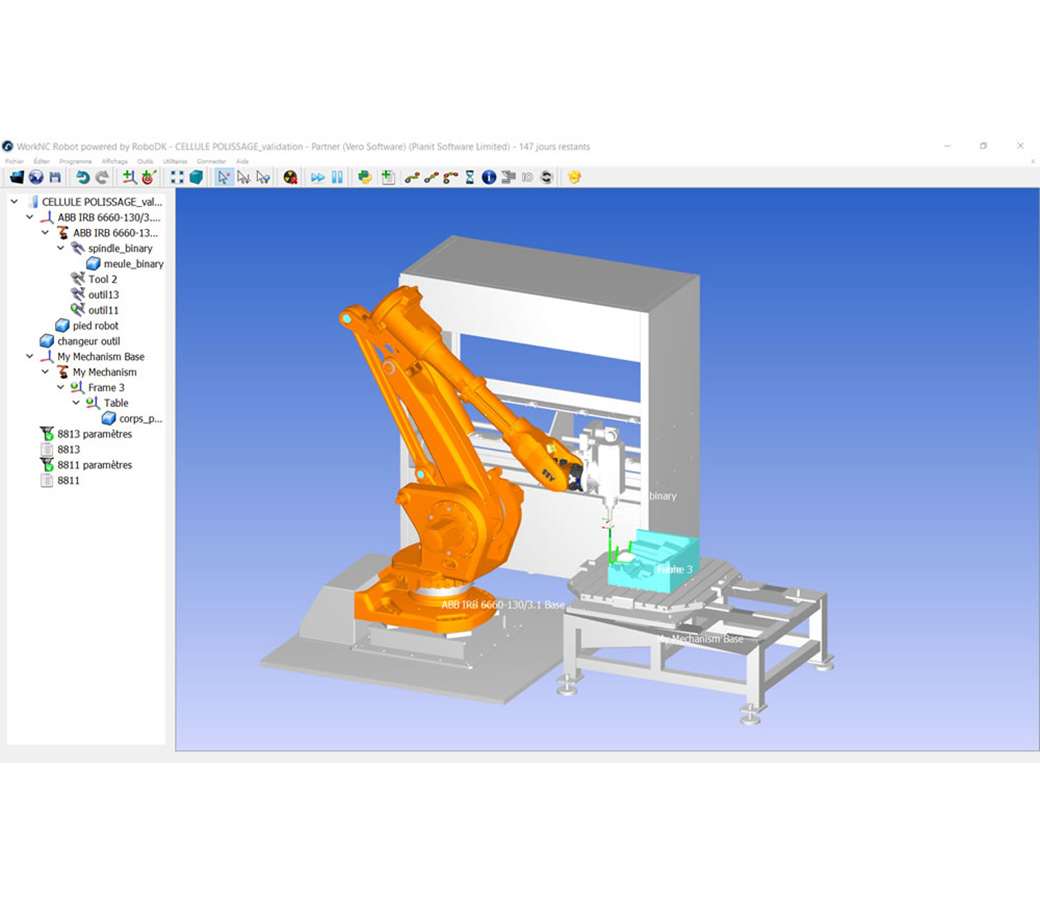
「複雑な」ロボットの動きには、ロボット、ツールチェンジャーマガジン、テーブル、その他のサポート、補助軸、安全バリアなどのさまざまな要素間の衝突を検出するために、ロボットセルの正確な CAD モデルが必要です。
軌跡の最適化-特異性
軌跡はロボットの手首や腕に特異性の問題を引き起こす可能性があります。WORKNC ロボットは、軌跡の潜在的な特異条件を自動的に検出し、オペレーターが適切な措置を講じることができるように警告を発します。
ロボットアプリケーション内のシミュレーションにより、ロボットの動きを最適化できます。このモジュールは最適化された軌跡を確保するために、ロボットの設定または補完的な位置を知らせます。
高い軌跡精度により、最高品質の最終製品が保証されます。
異なるセルプロセスまたは構成
ツール搭載型ロボット
ツール搭載型のロボットセル構成により、超大型部品や重量部品の加工やさまざまなプロセスの適用が可能になります。
このプロセスでは、ツールチェンジャーマガジンを使用することにより、ロボット上でツールや加工装置を交換することが可能です。複数のツールを同時にロボットヘッド上に配置することができます。
部品搭載型ロボット
この種のソリューションは、ロボットの能力に制限のある小さな部品の連続生産を目的として提案されています。
このプロセスでは、ベルトコンベアへのブランクのロードから、機械加工を完了し、ベルトコンベアに部品を戻すまで、自動化されたセルを制御できます。
WORKNC ロボットは、回転テーブル、レール搭載ロボット、3 直線軸ガントリーなど、4 軸から 7 軸までのあらゆるタイプのロボットを操縦できます。
WORKNC ロボットは 250 台以上の既存加工機のライブラリを提供し、22 台以上を供給しています。
ロボットのタイプ
WORKNC ロボットは、あらゆるブランドのロボットに適応します。
WORKNC ロボットポストプロセッサーは、生産施設に応じて設定可能です。各コントローラー専用のシミュレータにより、すべての可能なパラメータを考慮して、あらゆるタイプのロボット操縦プログラムを作成します。
STAUBLI(VAL3、バージョン 6 および 7)
ABB
FANUC
YASKAWA_Motoman
KUKA