トラッキングの進歩:レーザートラッキング技術の再評価
性能の進化とソフトウェアがマルチセンサーの主流に
お問い合わせ先
レーザートラッカーは長い間、航空宇宙や、自動車、大規模製造部門と取引をする会社向けのポータブル測定ツールの選択肢でした。これらのシステムの用途は、現場での検査や、計測支援アライメントと組み立て、プロトタイプ製造、航空宇宙ツーリング、自動車ホワイトボディ測定、リバースエンジニアリング、超大型部品と組み立て用の部分合わせなどです。レーザートラッカーの利点は精度や、信頼性、大型の計測向けの耐久性です。しかし、その第一の利点はその可搬性です。重量、大きさ、部品の長さは、従来のCMMでは測定不可能でした。
![]() かつてレーザートラッカーは、小企業では非常に高額と見られていました。間に合わせのソリューションで、成功の程度こそ違っても、アライメントや認証の課題は実行されていました。今日、顧客の使用は、1000分の1インチのような範囲の厳しい公差を要求がある中、製造会社はレーザートラッカーの購入可能性を、前向きに検討しています。品質工程の文書化はもう一つの産業のトレンドで、企業は測定の工程の再評価を迫られています。1990年代初期の市場投入以来、市場の成熟がレーザートラッカーの価格を押し下げると共に、入手可能性が高めました。レーザートラッカー技術の大きな進化により、用途の拡張や機能性に注目が集まる火付け役となりました。
かつてレーザートラッカーは、小企業では非常に高額と見られていました。間に合わせのソリューションで、成功の程度こそ違っても、アライメントや認証の課題は実行されていました。今日、顧客の使用は、1000分の1インチのような範囲の厳しい公差を要求がある中、製造会社はレーザートラッカーの購入可能性を、前向きに検討しています。品質工程の文書化はもう一つの産業のトレンドで、企業は測定の工程の再評価を迫られています。1990年代初期の市場投入以来、市場の成熟がレーザートラッカーの価格を押し下げると共に、入手可能性が高めました。レーザートラッカー技術の大きな進化により、用途の拡張や機能性に注目が集まる火付け役となりました。
レーザートラッカーは、ポータブルな三次元測定機(PCMM)です。レーザービームを使用し正確に測定、三次元空間の目標物の形状を検査します。レーザービームが球状に取り付けられた逆反射器(SMR)に送られ、レーザートラッカーの二つの機械的軸、アジマス角と仰角軸または天頂角軸からの角度を測定します。このデータはレーザーからの距離と結びついて、XYZ座標を計算します。
 今日のレーザートラッカーの初期のモデルは、距離の計測にレーザー干渉計を使用しましたが、単調で時間の掛かるものでした。レーザービームが切れるたびに、オペレータは反射器をトラッカーの原点に戻さなければなりませんでした。これは特に測定中サイクル中に、リフレクタが20-30フィートの追跡の場合に、時間の浪費、結果的には、作業者やケーブルのように、経費もしかりでした。予備手段もありましたが、もし装置が視線に障害物が多くある場合は、ビームが繰り返し中断するのは、珍しいことではありませんでした。1995年, 絶対距離計(ADM)がレーザートラッカーに一体化され、その使用法に革命を起こしました。もしビームが中断されても、オペレータは知っている位置に戻って、装置を”リセット”する必要がなくなりました。オペレータはビームの位置をただ変えるだけで 、検査を続行できます。最初の繰り返しではADMは、他の干渉計に比べて遅く、かなり精度も劣っていました。 技術は急速に進化し、今日かつて比較した干渉計よりも、精度に優れたADMが入手できます。一部の装置は、単体のADMと干渉計の技術 を一体化して、絶対干渉計(AIFM)と呼ばれる、単一の測定装置になりました。
今日のレーザートラッカーの初期のモデルは、距離の計測にレーザー干渉計を使用しましたが、単調で時間の掛かるものでした。レーザービームが切れるたびに、オペレータは反射器をトラッカーの原点に戻さなければなりませんでした。これは特に測定中サイクル中に、リフレクタが20-30フィートの追跡の場合に、時間の浪費、結果的には、作業者やケーブルのように、経費もしかりでした。予備手段もありましたが、もし装置が視線に障害物が多くある場合は、ビームが繰り返し中断するのは、珍しいことではありませんでした。1995年, 絶対距離計(ADM)がレーザートラッカーに一体化され、その使用法に革命を起こしました。もしビームが中断されても、オペレータは知っている位置に戻って、装置を”リセット”する必要がなくなりました。オペレータはビームの位置をただ変えるだけで 、検査を続行できます。最初の繰り返しではADMは、他の干渉計に比べて遅く、かなり精度も劣っていました。 技術は急速に進化し、今日かつて比較した干渉計よりも、精度に優れたADMが入手できます。一部の装置は、単体のADMと干渉計の技術 を一体化して、絶対干渉計(AIFM)と呼ばれる、単一の測定装置になりました。
Leica Geosystems AT901 Absolute Tracker, (Hexagon Manufacturing Intelligence, ノースキングズタウン、米国ロードアイランド州)のような、一定のレーザートラッカーでは、オペレータがビームを見つけるのではなくビームがオペレータを見つけます。 トラッカー内蔵のPowerLockカメラが、円錐状の視野を使ってリフレクタを拾います。オペレータはトラッカーの付近に居るだけで、リフレクタにビームをロックできるので、この進化は検査時間を短くします。
非常に正確ですが、レーザートラッカーは照準線内の測定に限られます。明確な照準線がないと、何度も移動するトラッカーは単一のツールや部品の完全な検査が必須となります。
手持ち式レーザートラッカーの付属品は、プローブやスキャナー上の赤外線ダイオードの既知のパターンをモニターすることにより機能します。点を プローブする時、トラッカーはプローブのXYZ 位置を計算します。加えて、カメラはプローブの回転値RX, RY, RZを計算します。 この二つが結びついて6自由度(6 DoF)を入手します。 これらのツールは以前の世代のレーザートラッカーでは成し得なかった広範囲な新機能や進化を実現します。
1. ステーションの移動は不要
手持ちのテクノロジーを使用の場合、測定点までの直接の照準線は必要ありません。この進化をベースに、球面容積最大328フィート以内の全体を一か所の設定で測ることができます。トラッカーを当初の位置に固定しておくことは、精度とデータ統合を助けます。これは形状が明瞭でない大型の測定物に有利です。手持ちのプローブやスキャナーは、部品の背後や内部あるいは、逆さまでも操作可能で、3Dデータの取得ができるからです。
2. SMRはオプション
コーナーキューブとしても知られる球状取付再帰反射器は、小さいので落としたり壊したり、置き忘れたりしがちです。特に難度の高い課題で、オペレータがガードレールを握るのに自由になる手が欲しい時に、操作が困難になる可能性があります。また測定範囲にも制限があります。コーナーキューブの使用時は、レーザートラッカーのビームの入射角度は、±22以下の角度でなければなりません。手持ちプローブを使用すると入射角度は、 ±45°に広がるので、検査がし易くなり、速度も大きく増加します。
さらには、再帰反射器と一緒に使われるターゲットキットは、潜在的なエラーの原因を誘発する可能性があります。よくあるミスは、インチとメトリックサイズの混同です。例えば、25mmのリフレクタホルダーは、1インチ(25.4mm)のものとの区別が視認できません。

3. 手持ち機はトラッカーと交信
手持ちのプローブはどちら側にも、3D座標データの取得と測定ソフトウェアとの交信用に複数のコントロールがあります。オペレータがデータ入力にコンピュータに戻る必要がないので、これらのコントロールは、時間の節約が特長となっています。これは可能性として、測定に二人でなく一人で済み、マンパワーの削減になります。
レーザートラッキング機の中には、リモートで情報エントリーができます。しかし、これらは検査が完了したことを確認する必要なフィードバックを、リアルタイムで出しません。またリモート付システムは、近接性に制限なる用途には不便です。
4. スキャニング用途の改善
かつて、レーザートラッカーで部分をスキャンする唯一の方法は、表面をSMRでぬぐうことでした。レーザースキャニングの利点がある用途では、毎秒千単位で点を収集できる手持ち式のスキャナーは、レーザートラッカーで追跡されて、大きな範囲で潜在的に正確な巨大な点群が可能です。このテクノロジーを使用して、CADモデルは稼働中に質問ができるので、検査時間を日単位から、時間単位まで削減します。
5. 固定具は自在
空間での目標物の絶対位置を知らないと、測定に部品を支える固定具が必要になるかも知れません。設計変更の繰り返しは固定具の変更を伴い、費用と時間がかかります。目標物のすべての面を検査できる機能により、ソフトウェア内で数学上のモデル作成ができるため、本質的にはバーチャル固定具の作成となります。次にオペレータは物理的な環境で新しい固定具を作る代わりに、バーチャル環境でモデルを操作可能です。一定の組み立てサイクルにおける製品のバリエーションの増加や、大型のプロトタイプの制作、材料費の節約、敏速な市場投入など設計エンジニアは大きなメリットが得られます。
6. ロボットシステムの自動化
レーザートラッカーは、ロボットのオートメーションを容易にして、高精度でない低コストのロボットを高精度の用途にも使えます。コーナーキューブはレーザートラッカーをアシストして、連結の長さ、ねじり角度、ジョイントゼロ、連結オフセット、剛性パラメータなどを考慮して産業ロボットの校正ができます。
ロボットを自動化するもう一つの方法は、6自由度を使用して必要な位置へロボットをガイドすることです。この機能により、ロボットメーカーはエンドエフェクタを校正サイクル中に少ないポーズで、修正することができます。またツーリングセンターポイント(TCP)の正確な位置がリアルタイムで判ります。
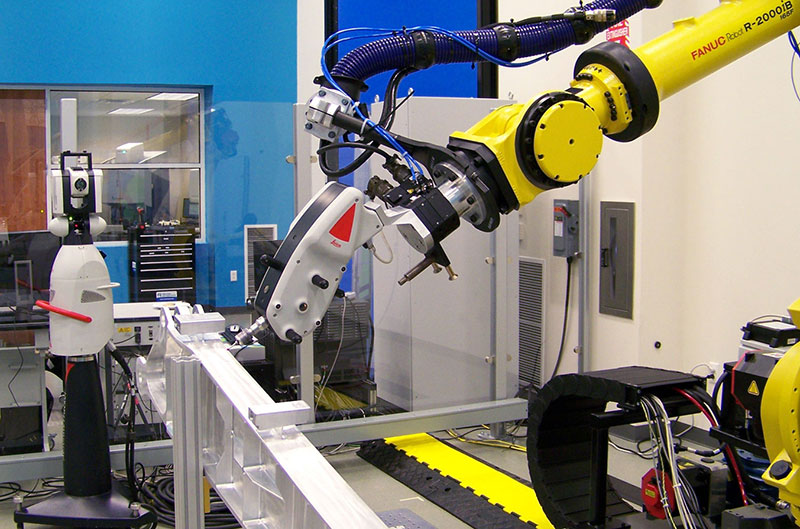 産業ロボットを自動化する最後の方法は、特大の部品の機械上での検査です。これを考案する一番簡単な方法は、ロボットをとてつもなく繰り返しがきくオペレータとして見なすことです。ロボットは検査のため、部品の上まで手持ち装置を移動しますが、測定は機械でなく、レーザートラッカーによって記録されます。これによって結果の精度は、十分な精度に欠けるNC工作機械でなく、トラッカーの精度がベースとなることが確認されます。レーザートラッカー技術は、経済的にさらに入手しやすくなっている今、レーザートラッカー自体は、さらに小型軽量化、速くて、ますますユーザーフレンドリーになりました。手持ちのスキャニングや、プロービング、機械制御製品はレーザートラッカーのフレキシビリティを高めて、提供可能な用途は目立って増加しました。バッテリ稼働やIP54(侵入保護)のオプション採用は、今日のレーザートラッカーをかつて考えられなかった場所まで移動できるようにしました。このテクノロジーの需要が拡大を続ける中、入手可能性は一番小規模なジョブショップも拡大。レーザートラッカーは大勢の観衆からの再評価を求めています。
産業ロボットを自動化する最後の方法は、特大の部品の機械上での検査です。これを考案する一番簡単な方法は、ロボットをとてつもなく繰り返しがきくオペレータとして見なすことです。ロボットは検査のため、部品の上まで手持ち装置を移動しますが、測定は機械でなく、レーザートラッカーによって記録されます。これによって結果の精度は、十分な精度に欠けるNC工作機械でなく、トラッカーの精度がベースとなることが確認されます。レーザートラッカー技術は、経済的にさらに入手しやすくなっている今、レーザートラッカー自体は、さらに小型軽量化、速くて、ますますユーザーフレンドリーになりました。手持ちのスキャニングや、プロービング、機械制御製品はレーザートラッカーのフレキシビリティを高めて、提供可能な用途は目立って増加しました。バッテリ稼働やIP54(侵入保護)のオプション採用は、今日のレーザートラッカーをかつて考えられなかった場所まで移動できるようにしました。このテクノロジーの需要が拡大を続ける中、入手可能性は一番小規模なジョブショップも拡大。レーザートラッカーは大勢の観衆からの再評価を求めています。
