트래킹 과정: 레이저 트래커 기술 재평가
기능과 소프트웨어 발전으로 멀티 센서의 대세
문의하기
레이저 트래커는 오랫동안 항공 우주, 자동차, 기타 대규모 생산 부문에 종사하는 회사들이 선택하는 이동식 측정 도구 였습니다. 이 시스템의 적용에는 현장 검사, 측정 지원 정렬 및 조립, 시제품 제작, 항공 우주 산업의 치공구, 자동차 BIW(body-in-white) 측정, 역설계, 대형 부품 및 조립을 위한 부품 가상 조립 등이 포함 됩니다.
![]() 레이저 트래커 시스템은 대형 부품의 측정 분야 에서의 정밀도, 신뢰도, 내구성에서 탁월함을 보입니다. 그러나 가장 큰 장점은 이동성에 있습니다. 어떤 부품들 중 무겁고, 크고, 긴 부품들은 전통적인 좌표 측정기(CMM)로 측정하는 것이 불가능합니다.
레이저 트래커 시스템은 대형 부품의 측정 분야 에서의 정밀도, 신뢰도, 내구성에서 탁월함을 보입니다. 그러나 가장 큰 장점은 이동성에 있습니다. 어떤 부품들 중 무겁고, 크고, 긴 부품들은 전통적인 좌표 측정기(CMM)로 측정하는 것이 불가능합니다.
과거에 레이저 트래커는 작은 회사로서는 감당할 수 없을 정도의 엄청난 큰 금액의 장비로 인식되어 왔습니다. 그런 회사들에게는 임시 방편 적인 솔루션을 통해 다양한 수준의 성공으로 정렬 및 인증 작업을 해 왔습니다. 오늘날 고객 사양서는 수 천분의 일 인치 범위의 엄격한 공차를 요구하기 때문에 제조 회사들은 새로운 관심으로 레이저 트래커의 실현 가능성을 연구하고 있습니다. 품질 관리 공정을 문서화하는 것은 기업들로 하여금 측정 절차를 재평가 하게 하는 또 다른 산업 트렌드입니다. 1990년대 초기 시작 이후 시장이 성숙해지면서 레이저 트래커의 가격을 끌어내렸기 때문에 접근성이 높아졌습니다. 레이저 트래커 기술의 주요 발전은 그에 대한 관심을 촉발시켜 용도와 기능을 확장 시켰습니다.
레이저 트래커는 3차원 공간상에서 제품의 특성들을 정밀하게 측정하고 검사하기 위해 레이저 빔을 사용하는 이동식 좌표 측정 기기(PCMM)입니다. 레이저 빔은 트래커의 두 개의 기계 축, 중심축 및 고도 축 또는 방위각 축으로부터의 각도를 측정하기 위해 구형으로 장착된 반사구(SMR)로 보내 집니다. 다음에 이 데이터가 레이저로부터의 거리와 결합되어 X, Y, Z 좌표를 계산합니다.
오늘날 레이저 트래커의 초기 모델들은 거리를 측정하기 위해 레이저 간섭계를 사용했는데 지루하고 시간이 많아 소요되었습니다. 레이저 빔이 단절 될 때마다 작업자는 리플렉터를 트래커의 홈 포지션으로 되돌려 놓아야 했습니다. 이것은 시간을 낭비했고 결과적으로 돈을 낭비하는 것이었습니다. 특히 리플렉터가 측정 사이클 동안 20 ~ 30 피트 벗어난 경우에는 더욱 그렇습니다. 치공구에 작업자나 케이블 같은 장애물이 많은 경우 빔이 반복적으로 단절되는 일이 흔히 있었습니다.

Hexagon의 T-Probe Solar Reserve
1995년에 절대 거리 측정계(ADM)가 레이저 트래커에 통합되었고 그 동안의 사용 방법을 혁신 시켰습니다. 빔이 단절이 되어도 작업자는 기기를 “리셋”하기 위해 더 이상 홈 포지션 위치로 돌아 갈 필요가 없었습니다. 작업자는 단지 빔을 이동시켜 검사를 계속했습니다. 첫 번째 반복에서 ADM은 경쟁 상대인 간섭계보다 속도가 늦었고 정확성도 떨어졌습니다. 기술은 매우 빨리 발전했고 오늘날 한 때 비교 대상이었던 간섭계 보다 더 정확한 ADM이 가능 해졌습니다. 어떤 레이져 트래커는 절대 간섭계(AIFM)이라고 불리는 개별 ADM과 간섭계 기술을 단일 측정 기기로 통합 하였습니다.
Leica Geosystems의 AT901 Absolute Tracker (Hexagon Metrology, North Kingstown, RI) 같은 레이저 트래커는 작업자가 빔을 찾을 필요 없이 빔이 작업자를 찾습니다. 트래커 안에 내장된 PowerLock 카메라가 리플렉터를 찾기 위해 원뿔 형태의 시계(視界)를 사용 합니다. 이런 발전으로 인해 작업자는 리플렉터에 비추는 빔을 재 조준하기 위해 트래커 근체에 있기만 하면 되기 때문에 검사 시간을 줄일 수 있습니다.
정밀도가 매우 높아도 레이저 트래커는 가시범위 내에서 만 측정이 가능합니다. 측정 시야가 확보 되지 않으면 단일 치공구나 부품에 대한 전체 검사를 하기 위해서 트래커를 여러 번 움직여야만 합니다. 소중한 시간을 낭비할 뿐 아니라 움직일 때마다 복합적 에러가 생기기 때문에 정밀도도 떨어집니다. 이런 결점에 대한 해결책으로 휴대용 이동식 측정 장치의 도입 입니다.
프로브 또는 스캐너에 장착 된 적외선 다이오드의 알려진 패턴을 모니터링 하여 휴대용 레이저 트래커의 액세서리 기능을 제공 합니다. 한 점을 측정하면 트래커는 프로브의 X, Y, Z 위치를 계산하고, 카메라는 프로브의 회전 값 RX, RY, RZ를 계산 합니다. 이 두 가지가 6자유도(6 DoF) 데이터를 얻기 위해 결합 됩니다. 이런 측정 도구는 레이저 트래커의 이전 버전에서는 불가능했던 광범위한 새로운 기능과 혁신을 제공 합니다.
1. 레이져 트래커를 움직일 필요가 없습니다
휴대용 측정 장치를 사용하여 측정 할 때는 시야가 확보되지 않아도 측정이 가능합니다. 이런 발전으로 인해 트래커는 한 위치에서 측정 영역 328 피트 이내의 (구형 볼륨) 모든 지점을 측정 할 수 있습니다. 트래커를 원래의 위치에 유지 시키는 것은 정밀도를 높이고 테이터 통합에 도움이 됩니다. 이것은 휴대용 프로브 스캐너가 부품 안이나 뒤에서 3차원 데이터를 수집하기 위해 사용 될 수 있기 때문에 특성이 애매한 큰 제품 측정에 유리 합니다.
2. 반사구(SMR) 는 이제 옵션이 되었습니다
코너 큐브(corner cubes)로 언급되는 구형 장착 반사구는 크기가 작고 떨어져서 깨지거나 위치가 잘못되기도 합니다. 특히 작업자가 손으로 난간을 잡아야 하는 어려운 여건 하에서는 사용하기 어렵습니다. 또한 측정 범위도 제한적 입니다. 코너 큐브를 사용할 때 레이저 트래커의 빔은 ±22 도 이하의 각도로 들어가야 합니다. 휴대용 프로브를 사용해 입사각을 ±45도 까지 넓히면 검사를 쉽게 하고 속도를 크게 높일 수 있습니다.
또, 반사구와 연결하여 사용되는 타겟 키트(target kits)는 잠재적 에러의 원인이 될 수 있습니다. 일반적인 실수는 영국식 단위와 미터 단위 간의 혼란에서 발생됩니다. 예를 들면, 25 mm 반사경 홀더는 1인치 (25.4 mm) 크기와 시각적으로 구분될 수 없습니다.

3. 휴대용 측정 장치가 트래커와 상호 작용 합니다.
휴대용 프로브에는 3차원 좌표 데이터를 얻기 위해 기기의 한 쪽에 여러 개의 제어 장치가 들어 있습니다. 작업자가 데이터를 입력하기 위해 컴퓨터에 돌아오지 않아도 되기 때문에 이런 제어 장치가 시간을 줄여주는 기능을 합니다. 이로 인해 측정하는데 두 사람이 아니라 한 사람만 필요하므로 인건비도 절감될 수 있습니다.
어떤 레이저 트래커 시스템은 원격조종으로 정보를 입력할 수 있습니다. 그러나 이것은 검사가 정확하게 완료될 수 있게 하기 위해 필요한 피드백을 실시간으로 제공해 주지 못합니다. 원격 조종이 있는 시스템은 또 접근이 제한 된다는 점에서 불리합니다.
4. 스캐닝 적용 분야가 개선 되었습니다
과거에는 레이저 트래커로 부품을 스캔하는 유일한 방법은 반사구를 제품 표면 위에 문지르는 것이었습니다. 레이저 스캐닝이 유리한 어플리케이션에서는 초 당 수 십만 개의 포인트를 수집할 수 있는 휴대용 스캐너가 레이저 트래커에 의해 추적되어 거대한 점 군을 형성하며 이 점 군으로 정밀한 분석이 가능합니다. 이 기술은 CAD 모델을 현장에서 사용하여 검사 시간을 검사 시간을 며칠에서 몇 시간으로 단축 할 수 있습니다.
5. 고정치구의 유연성
공간에서 물체의 절대 위치를 알지 못하면 고정치구는 검사를 위해 부품을 지지하는 고정구를 필요로 할 수 있습니다. 설계가 반복 되려면 고정치구가 변경되어야 하는 데 이는 시간과 비용이 많이 소요 됩니다. 제품의 모든 측면을 검사하는 기능으로 가상의 고정치구를 만드는 소프트웨어 안에 수학적 모델 생성이 가능합니다. 그러면 작업자는 물리적 환경에서 새로운 고정치구를 만드는 것이 아니라 가상의 환경에서 모델을 조작할 수 있습니다. 설계 엔지니어는 특정 조립 사이클에서 제품 변화가 커짐에 따라 크기가 대형 시제품 제작 기능, 재료비 절감 및 제품 출시 시간의 단축 등과 같은 이익을 얻을 수 있습니다.
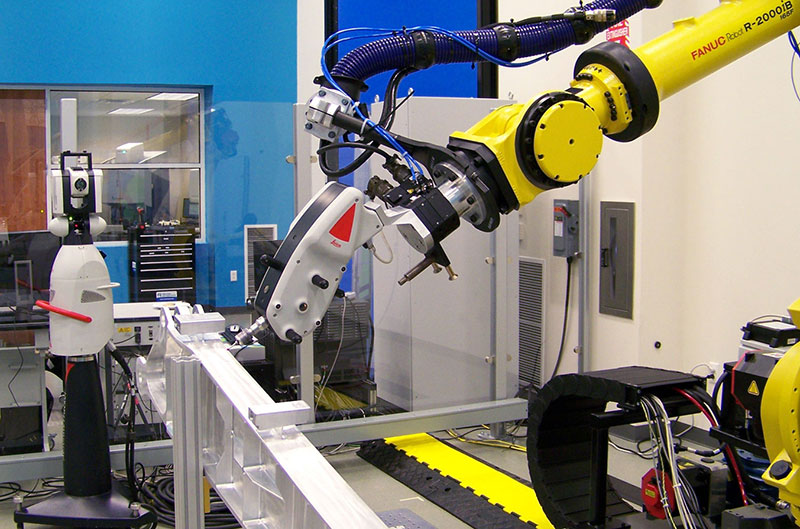
6. 로봇을 활용한 자동화 시스템
레이저 트래커 시스템은 로봇을 활용한 자동화 시스템 구축이 가능하며 덜 정밀하고 저비용의 로봇이 높은 정밀도에 사용될 수 있게 해 줍니다. 코너 큐브는 링크 길이, 트위스트 각도, 조인트 제로, 링크 옵셋 및 경직도 변수를 고려함으로써 레이저 트래커가 산업용 로봇을 켈리브레이션 하도록 지원할 수 있습니다.
로봇을 자동화하는 또 다른 방법은 6자유도를 사용해 요구된 위치에 로봇을 안내하는 것입니다. 이 기능을 통해 로봇 제조 회사는 적은 양의 포즈로 켈리브레이션 사이클 중에 End Effector를 수정 할 수 있습니다. 또한TCP(Tooling Center Point)의 정확한 위치를 실시간으로 알 수 있습니다.
산업용 로봇을 자
동화하는 마지막 방법은 크기가 큰 부품의 기상검사를 가능하게 하는 것입니다. 이것을 생각하는 가장 쉬운 방법은 로봇을 계속 반복 작업만 하는 작업자로 간주하는 것입니다. 로봇이 휴대용 장치를 이동하여 검사 하지만 측정은 기계 대신 레이저 트래커에 의해 기록 됩니다. 이렇게 사용 하면 정밀도가 떨어지는 NC 기계가 아니라 트래커의 정밀도에 따라 측정 결과의 정밀도가 보장 됩니다.
레이저 트래커의 기술이 경제적으로 보다 접근 가능해짐에 따라 레이저 트래커 자체는 더 작고 더 가벼워지고 더 빠르고 보다 더 사용자 친화적으로 발전 되었습니다.
휴대용 스캐닝, 프로빙 및 기계 제어 제품들은 레이저 트래커의 활용성을 높였고, 적용 가능한 어플리케이션의 수 도 기하급수적으로 늘어났습니다. 배터리 작동과 IP54 보호등급 같은 옵션들로 인해 오늘날 레이저 트래커는 사람들이 가능하다고 생각 하지도 못한 영역까지 발전 했습니다. 이 기술에 대한 수요가 계속 확장됨에 따라 그의 적용도 소규모의 생산 현장까지 확대 되었습니다. 레이저 트래커는 보다 많은 고객들로부터 차세대 기술 개발을 요구 받고 있습니다.
