Università degli studi di Padova
L’obiettivo della tesi è la realizzazione di un sistema di sospensioni attive a basso consumo.
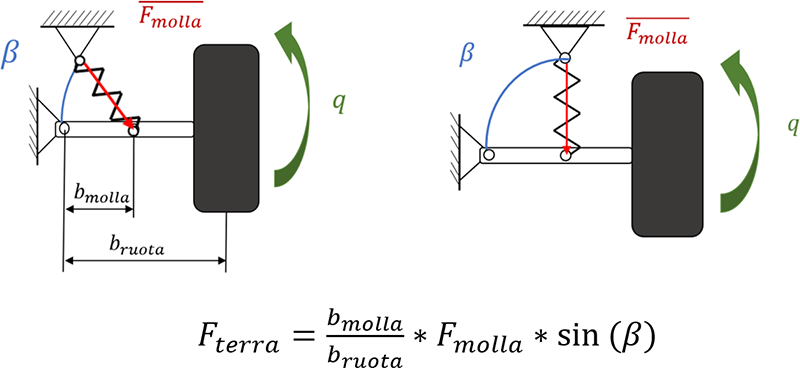
Per raggiungere tale traguardo, è stato deciso di impiegare una sospensione a geometria variabile in grado di modificare la componente della forza generata dalla molla che effettivamente produce un momento sul braccetto sospensione.
REQUISITI DEL SISTEMA
Per realizzare un sistema di sospensione attiva a geometria variabile a basso consumo energetico, per applicazioni automobilistiche, è preferibile che si rispettino le seguenti caratteristiche:
- Ampia capacità di poter variare i rapporti di velocità, per una maggiore flessibilità del sistema
- Possibilità di poter arrivare ad annullare la forza generata dalla sospensione
- Costanza del rapporto di velocità al variare della corsa della sospensione, se non viene azionato l’attuatore per variare la geometria della sospensione
- Utilizzo di sole coppie rotoidali, più semplici ed economiche da realizzare
- Capacità di poter permettere elevate corse della sospensione qualsiasi sia il rapporto di velocità selezionato (è possibile ottenere questa caratteristica rendendo fisso l’attuatore idraulico della sospensione)
- Utilizzo del minor numero di membri possibile per ridurre i costi
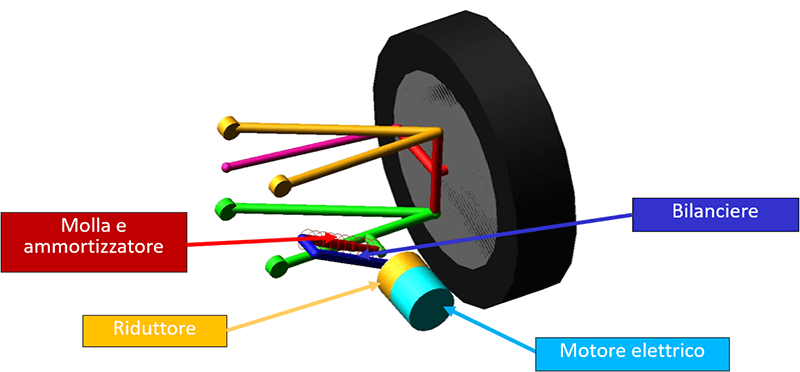
- Motore elettrico dell’attuatore fissato al telaio, per ridurre le masse non sospese e le sollecitazioni al motore stesso
- Forza di attuazione nulla per variare la geometria della sospensione quando la corsa della sospensione è in posizione neutra
Per quest’ultimo punto basta fare in modo che l’asse di rotazione della biella dell’attuatore elettrico coincida con uno dei due punti in cui è imperniata la molla.
ANALISI CINEMATICA
Per prima cosa è stata eseguita una analisi cinematica del sistema, utilizzando un modello creato in Adams View per verificarne i risultati.
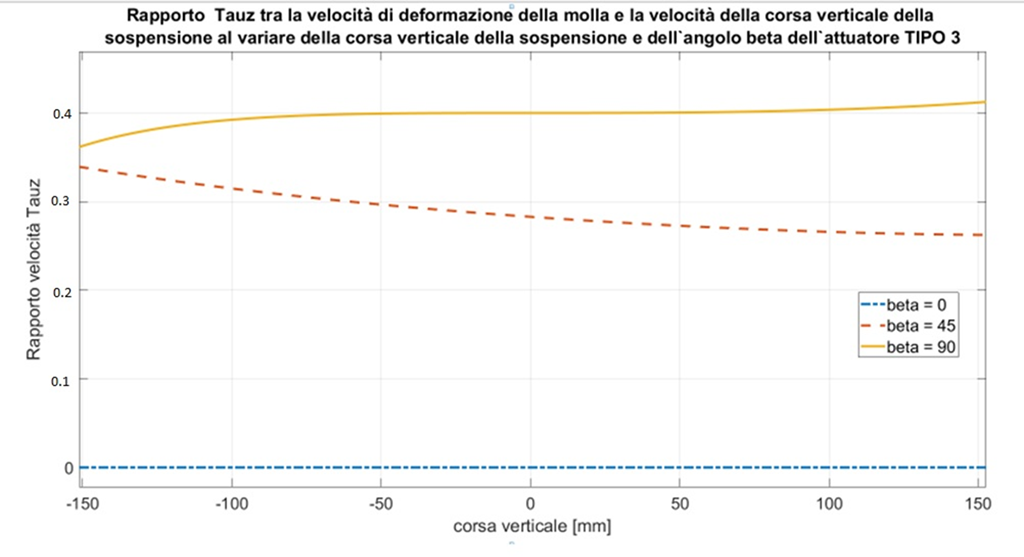
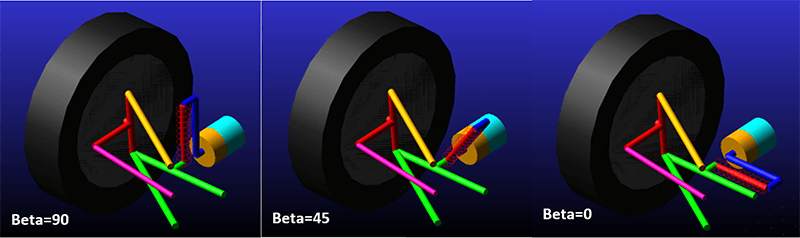
Risulta di particolare interesse la variazione del rapporto tra velocità di deformazione della molla e la velocità della corsa verticale della sospensione al variare dell’angolo del braccetto della sospensione e dell’angolo dell’attuatore.
SIMULAZIONI CON ADAMS CAR
Per verificare le prestazioni del sistema rispetto ad un sistema convenzionale di sospensione attive (in particolare un sistema di tipo SAVG) è stato deciso di eseguire una serie di simulazioni comparando entrambe le soluzioni.
Il veicolo utilizzato all’interno delle simulazioni è basato sul veicolo “DEMO” presente all’interno del programma a cui sono stati cambiati i sottosistemi relativi alle sospensioni anteriori e posteriori.
Per controllare gli attuatori durante le simulazioni sono state adottate diverse strategie di controllo
- Controllo Open loop utilizzando i valori dell’angolo di sterzo e di potenza frenante come dati di ingresso
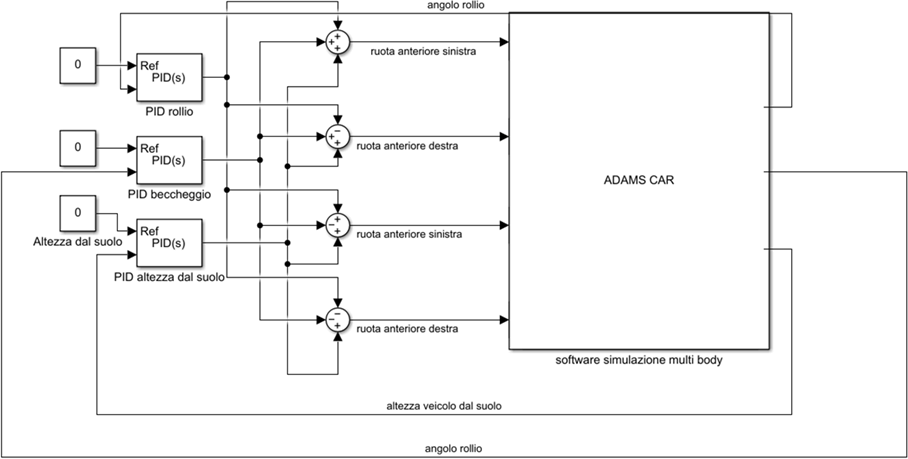
- Controllo PID che utilizza 3 controllori per mantenere rispettivamente rollio beccheggio e altezza dal suolo costanti
- PID feedforward che combina i due precedenti tipi di controllo
Il sistema di controllo è stato realizzato in Matlab Simulink e, utilizzando il plug-in “controls” di Adams Car, è stato possibile realizzare delle co-simulazioni che sfruttassero le potenzialità di entrambi i programmi.
È stato deciso di eseguire una serie di test specifici che mettessero in evidenza le prestazioni del sistema nel contenimento di rollio e beccheggio e nella riduzione delle vibrazioni trasmesse.
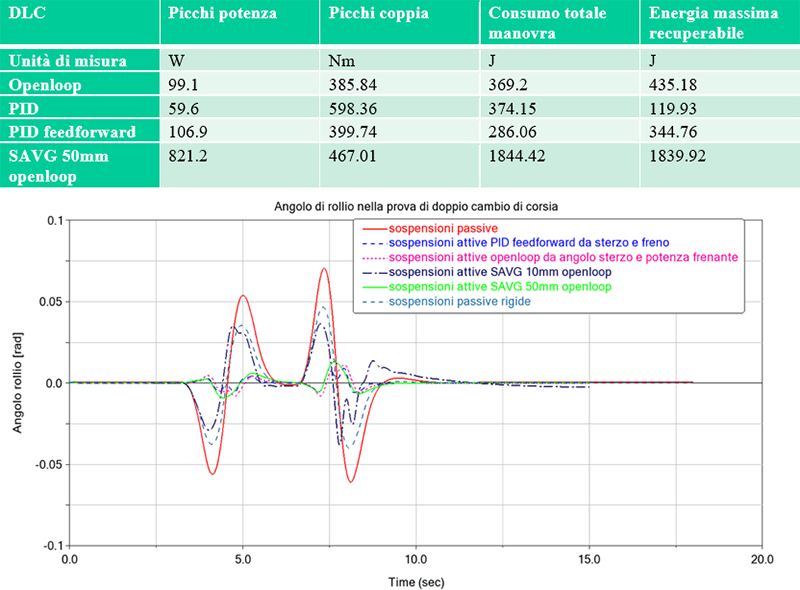
In un primo test, è stato valutato il contenimento del rollio durante una manovra di doppio cambio corsia eseguita alla velocità di 60km/h.
Dal post processore di Adams Car è stato inoltre possibile ricavare i dati relativi alla potenza massima impiegata, alla coppia richiesta dagli attuatori e al consumo energetico del sistema durante la prova.
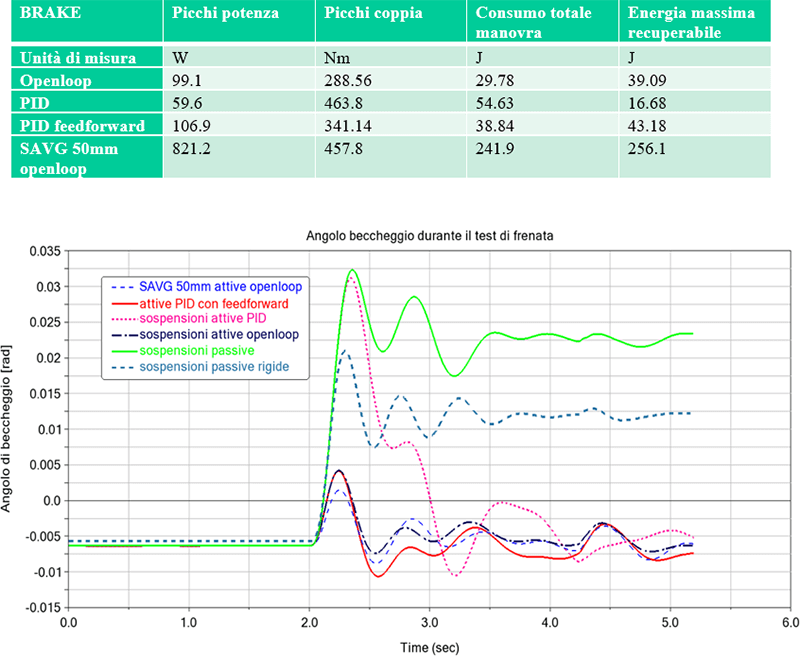
Successivamente è stato eseguito un test di frenata da 60km/h con una decelerazione costante di 0.5g
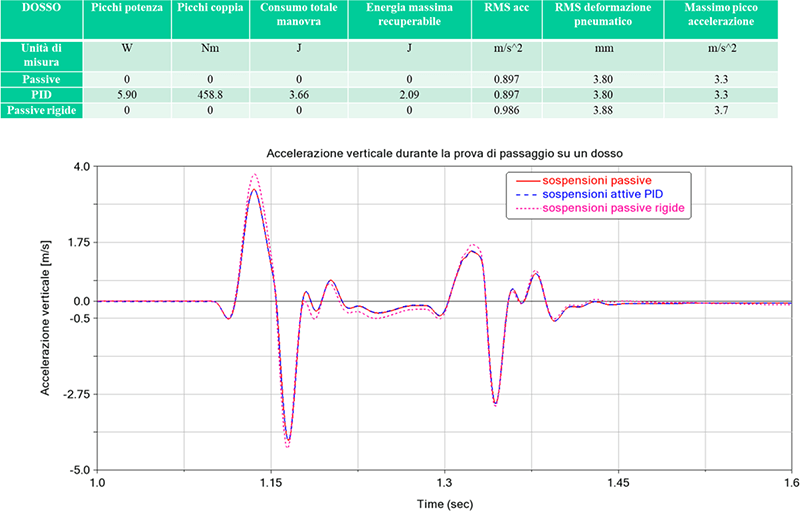
Infine è stato eseguito un test di passaggio su di un dosso alto 30mm alla velocità di 50km/h.
Conclusioni
- È stato sviluppato un sistema attivo a geometria variabile
- Si è ottenuta una riduzione del 78% dell’angolo di rollio e del 73% dell’angolo di beccheggio
- Il consumo del sistema è ridotto mediamente dell’ 84% rispetto al sistema SAVG con bilancieri da 50mm
- Il consumo e l’efficacia del sistema sono inoltre indipendenti dalla rigidezza delle molle scelte
- È stato utilizzato un controllore PID con azione feedforward per combinare le prestazioni con il controllo da eventuali disturbi esterni su rollio, beccheggio e altezza da terra
- La complessità del sistema è limitata ma comunque superiore a quella del sistema passivo
Autore: Menin Michele
Relatore: Matteo Massaro
Correlatore: Silvio Cocuzza
Anno Accademico: 2021-2022