Università degli Studi di Cassino e del Lazio Meridionale
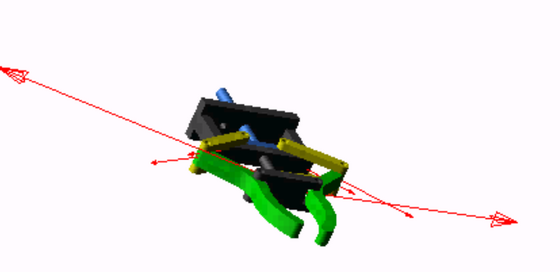
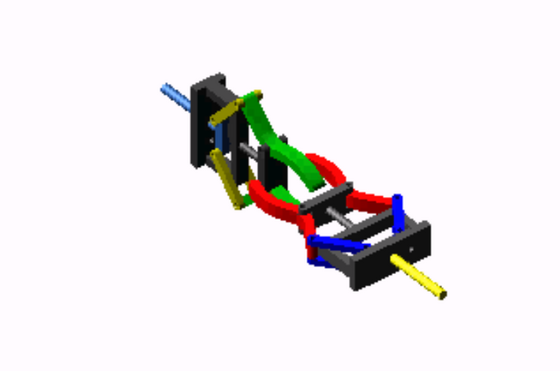
In questo lavoro è stata afffrontata e verificata la possibilità di co-simulazione avanzata tra dinamica multi-body ed analisi non lineare ad elementi finiti. Gli esempi illustrati hanno l‘obiettivo di indagare il comportamento di un oggetto deformabile nell’interazione con un sistema multicorpo, all’interno di un processo raffigurante operazioni che possono interessare la maggior parte dei processi robotizzati. In particolare, è stato realizzato in MSC Adams un gripper a due dita (Fig 1) che afferra e movimenta una sfera (Fig 3) o un cilindro deformabile (Fig 2), questi realizzati in MSC Marc. All’interno di Adams è stata definita la topologia del modello scegliendo i vincoli opportuni tra le parti e sono stati realizzati dei MOTION per definire il movimento degli artigli del gripper nonché il moto di roto-traslazione dell’intero gripper nello spazio.



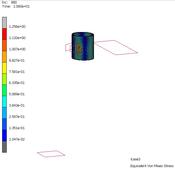
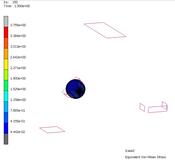
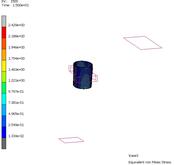
È stata definita in Marc una sfera defromabile di raggio esterno di18mm, spessa 2mm, posta su una superficie iniziale di appoggio. In maniera analoga è stato realizzato un cilindro con raggio esterno di base pari anch’esso a 18mm, di spessore 2mm e alto 40mm. È stato scelto Mooney come materiale per entrambi gli oggetti, definendo i valori delle costanti del materiale C10=2 e C01=8.
I due oggetti sono posizionati su due differenti superfici di appoggio iniziali. All’interno dei modelli Marc sono state realizzate le superfici di contatto che andranno in presa con gli oggetti. Sono state realizzate in Marc superfici piane e/o curve degli artigli del gripper a seconda dei casi di studio.


A queste superfici sono stati associati i nodi di controllo che, tramite MSC CoSim, sono stati accoppiati alle Gforces definite nel modello MB in Adams.
Lo scopo del lavoro è stato quello di:
- Definire una procedura efficace per la produzione di esempi completi di co-simulazione MB - FEM;
- Produrre ed analizzare movimentazioni, spostamenti, deformazioni e stress, cioè grandezze che forniscono la quantificazione dei processi analizzati.
A titolo illustrativo si riportano i risultati di due casi di studio:
- Un solo gripper che movimenta i due aggetti deformabili
- Due gripper identici che si scambiano i due oggetti deformabili.
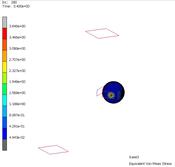
Viene mostrato l’andamento dello sforzo equivalente di Von Mises in Marc e l’andamento delle forze di contatto, ossia delle Gforces generatesi durante la presa dei due oggetti.
Caso 1
Nel primo esempio riportato il gripper realizza la presa e la movimentazione della sfera portandola su una superficie finale sfalsata da quella di appoggio, successivamente interagisce con il cilindro che viene portato nella posizione dove inizialmente si trovava la sfera. Il gripper produce uno schiacciamento e uno deformazione degli oggetti con la nascita di uno stato di sforzo e deformazone. Nella figura 1 viene riportato l’andamento delle Gforces. Le prime tre descrivono l’interazione con la sfera, mentre le altre nascono in seguito al contatto e movimento del cilindro.


Caso 2
Le forze di contatto sono 12 in totale, 3 per ogni gripper e 6 per ciascun modello Marc. Nei primi 10 sec si ha l’interazione con la sfera. Il primo gripper afferra l’oggetto per passarlo al secondo gripper che lo rilascerà su una differente superficie. Nei secondi successivi il primo gripper andrà ad afferrare il cilindro, lo passerà al secondo gripper che lo porterà sulla superficie di destinazione e infine rilasciarlo. Gli oggetti, afferrati da uno o da entrambi i gripper, si deformano. Nascono le Gforces il cui valore varia nelle differenti fasi della simulazione.

In questo lavoro di tesi sono state quindi individuate le potenzialità e le criticità di questa nuova tecnologia di co-simulazione: molti aspetti necessitano di ulteriore indagine.
Leonardo Di Paola
Università degli Studi di Cassino e del Lazio Meridionale
A.A. 2018/2019