Il presente elaborato ha l’obiettivo di descrivere le fasi operative che hanno portato alla costruzione di un modello relativo al software di dinamica Multibody Adams Car (MSCSoftware) di un veicolo facente parte della competizione Formula SAE Electric a cui il team “Fast Charge” dell’Università “La Sapienza” di Roma ha aderito.
Per la costruzione di tale modello il lavoro svolto si fonda principalmente sull’articolazione di due fasi. La prima fa riferimento alla modellazione nella maniera più reale possibile, delle componenti che costituiscono il veicolo in maniera tale da avere per ogni componente, una risposta che si avvicini il più possibile alla realtà. Nella fase successiva, invece, vengono formulate delle simulazioni attraverso delle prove di accelerazione e skidpad.
Le simulazioni vengono svolte su diversi scenari in base ai contesti in cui il veicolo può trovarsi nel corso delle gare, in maniera tale da riuscire a prevedere il comportamento delle componenti, le forze in gioco e avere la possibilità di testare i diversi settaggi per ottenere migliori prestazioni. L’obiettivo della tesi è quello di avere uno strumento in grado di predire, partendo da un modello teorico, il comportamento della vettura in modo da agire sulle problematiche dell’aspetto dinamico.
Cogliendo le varie sfaccettature del veicolo e del comportamento dello stesso in situazioni reali attraverso lo studio delle componenti e simulazioni si acquisisce uno strumento in grado di testare in maniera più efficiente le caratteristiche del veicolo e le modifiche da apportare allo stesso prima ancora della realizzazione pratica, avendo così un approccio in ottica ex ante che permette un risparmio di risorse economiche all’intero team “Fast Charge”. Per la prima fase si è partiti dai modelli (templates) già esistenti che MSC.Software consente d’usare a tutti i team di formula SAE i quali utilizzano come software dinamico multibody Adams Car.

Si è partiti dalla modellizzazione delle sospensioni che avevano una configurazione con ammortizzatori push rod: poichè questa configurazione era presente anche nei templates, è bastato sostituire la posizione degli hardpoints in modo da rappresentare in modo realistico la sospensione che stiamo analizzando. Le caratteristiche meccaniche di molle e ammortizzatori che caratterizzano la sospensione si riportano attraverso dei file di testo in cui vengono riportate i punti della curva spostamento-forza (per le molle) e velocità-forza (per gli ammortizzatori).

Si è passati alla modellazione degli pneumatici attraverso le Magic Formule di Pacejka. Per il telaio si è deciso di mantenere la modellazione che si è utilizzata nei templates, attraverso due sottosistemi chiamati rispettivamente, Trim Mass in cui viene considerata la posizione del baricentro e lo Chassis in cui vengono considerati i pesi dei componenti che non compaiono esplicitamente nel modello. Per i sottosistemi di sterzo e impianto frenante, si sono sostituiti i parametri che caratterizzano i sottosistemi del nostro veicolo riportati sul catalogo AP Racing nei templates.
Quindi si è passati alla modellazione del powertrain elettrico: per primo si è modellato il sottosistema del motore elettrico composto a sua volta da due sottosistemi, il motore che genera la curva di coppia e di potenza e il differenziale che ripartisce la coppia generata dal motore sui semiassi posteriori della vettura. Per riprodurre in maniera affidabile la curva di coppia si utilizza un file di testo in cui viene riportata la curva di coppia in funzione del numero di giri.

Si è passati alla modellazione dell’inverter e del pacco batteria, quest’ultimo modellato come un'unica cella di batteria anche se nella realtà è diverso; infatti, nel caso reale il pacco batteria è composto da diverse celle connesse in serie e in parallelo; quindi, questa modellazione va a trascurare tutti i fenomeni interni che avvengono tra le varie celle del pacco batteria. Quindi completati i vari sottosistemi si sono assemblati. Per ottenere il corretto funzionamento del modello è fondamentale che i sottosistemi trasmettano e ricevano informazioni tra loro attraverso la creazione di input/output communicator, che devono essere coerenti nel nome e nella tipologia.
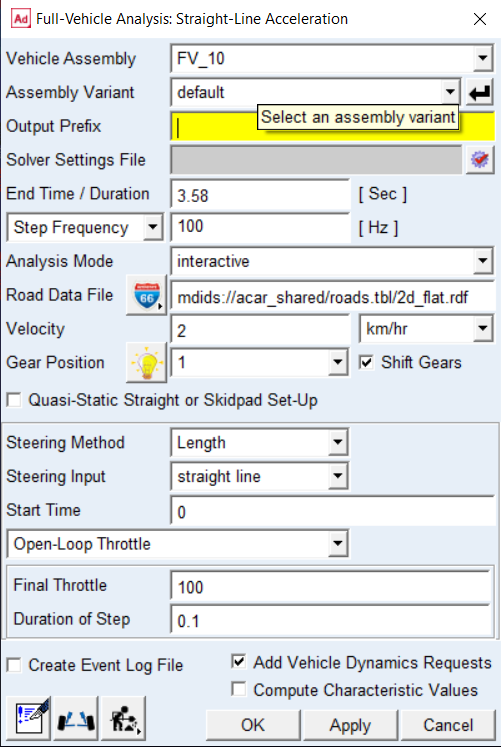
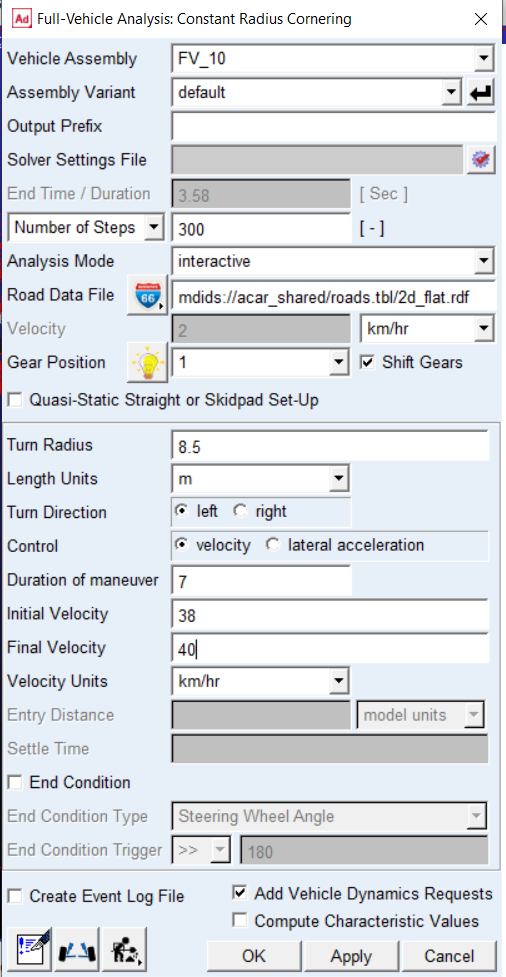
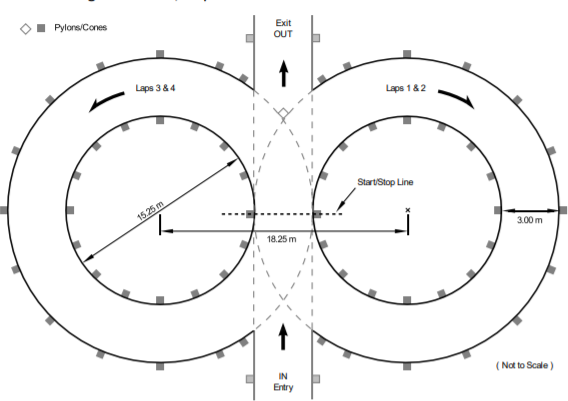
Quindi, assemblato il sistema, si può passare alla fase di simulazione, simulando la prova di accelerazione (Acceleration), e successivamente la prova di skidpad (Constant Radius Cornering) in cui non si modella il tracciato reale della curva che raffigura un “8”, ma si rappresenta una curva a raggio costante di 360 gradi (cerchio) e questa modellazione è congrua con quello che si voleva ottenere, visto che durante la prova reale i giudici cronometrano il singolo giro del cerchio di destra o di sinistra.
Infine si sono andati a variare il settaggio di molle e ammortizatore che ci hanno permesso di ottenere migliori risultati nelle due prove.
| Relatore: | Laureando: |
|---|---|
| Prof. Leone Martellucci | Andrea Giannaccari |
Anno Accademico 2021/2022