Learning-based schemes for tracking control of multibody space structures
Sapienza University of Rome
by Federica Angeletti
Growing interest is currently being addressed to in-space assembly and deploy operations worldwide. Most contemporary systems have exceeded the size of launching vehicles, leading to the necessity of packaging and stowing. Large space deployable masts in particular are actually employed to adequately support scientific payloads at considerable distance from the satellite platform. This study case presents the investigation on an innovative learning-based deployment strategy applied to an articulated large space mast. In general, learning can be considered as a method whereby a system can modify its actions to carry out a task more effectively due to the increase in knowledge related to the operation. The Iterative Learning by definition uses repetitive information deriving from iterations, and it can be therefore exploited to actuate the deployment process. Indeed, foldable structures are often composed by repetitive base units or modules. The entire deployed structure is assembled by the means of the online ILC control signal as the modules progressively open. The analysed truss structure is composed of cube-shaped sections. Each module is made of four foldable arms, that in turn consist of two rigid elements connected by hinges, and two outer bulkheads (see Fig. 1).

Due to its symmetry, the considered dynamic model can be simplified. Indeed, the structure appears to be completely symmetric with respect to a plane perpendicular to the bulkheads and passing through their centers of mass. As preliminary simulation effort, the model created in ADAMS environment has been maintained on a plane (see Fig. 2).

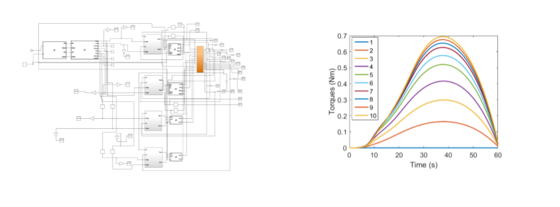
The mast has been built in the extended configuration. A kinematic pre-simulation was conducted to place each link to the closed condition, that is the starting point of the deployment process. The dynamics outputs are used to implement in real-time the control algorithm, built also by using Matlab code SIMULINK blocks. The control algorithm activates some BISTOP torques functions defined in ADAMS model when the links are closed to the fully extended configuration, to simulate the presence of and end stopper. A control flag is defined to change an input signal that activates the impact-type torque and blocks the link in the deployed configuration. The results have been exported to Matlab for the post-processing procedures. The control scheme blocks realized in SIMULINK to interface with ADAMS are presented in Fig. 3 and 3 bis.
The model has been upgraded to a tri-dimensional multibody system. Each module is composed of eight links connected by revolute joints to the spacecraft base and to the bulkheads. The frames are realized by the means of excavated box section bodies. The spacecraft is represented as a cubic platform with solar panels as appendices (no flexibility considered at this level of analysis). An overview of the complete system is proposed in Fig. 4.

Thus, the control system can be considered as an on-line supporting signal co-operating with a traditional feedback controller to achieve better deploying performance. The system is able to learn from the past experience, reducing the tracking error of the modules belonging to the successive iteration (see Fig. 5).
