Modello Multibody di una vettura di Formula Student con Adams Car
Università degli Studi di Modena e Reggio Emilia
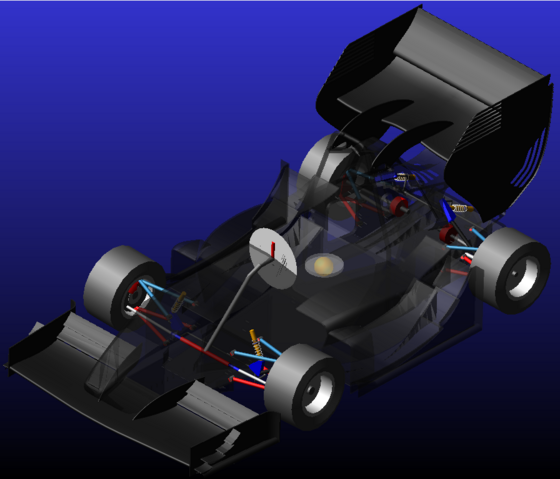
Il presente elaborato si pone come obiettivo la modellazione multibody della vettura M19-L del team di Formula SAE MMR – MoRe Modena Racing dell’Università degli Studi di Modena e Reggio Emilia, che ha concluso con il primo posto assoluto all’evento di Formula Student 2019, l’evento britannico del campionato di Formula SAE, tenutosi al circuito di Silverstone. Il software usato è Adams Car, facente parte della software suite di Adams.
Lo studio è stato diviso in quattro fasi:
- Raccolta dati della vettura dalle varie divisioni del team;
- Modellazione dei vari sottosistemi della vettura ed implementazione dei dati;
- Modellazione Full-Vehicle e studio del comportamento del modello attraverso varie simulazioni;
- Analisi dati di telemetria e confronto con i risultati delle simulazioni.
1. Modellazione ed implementazione dei dati
Il modello è stato sviluppato partendo dal database presente sul sito di MSC Software.
Le prime due fasi dello studio sono avvenute in parallelo in quanto, a seconda di come è stato modellato un sottosistema, sono stati raccolti i dati di interesse.
La vettura è stata divisa in vari sottosistemi.
a. Ali anteriore e posteriore:
Caricano il telaio con le forze aerodinamiche di Downforce e Drag.
b. Impianto frenante:
Applicano delle coppie frenanti su ogni ruota attraverso delle Point-Torque, dirette nella direzione opposta alla rotazione delle stesse, con lo scopo di frenare la vettura, a seconda della richiesta da parte del software durante la simulazione.
c. Telaio:
Costituisce il corpo della vettura, su cui si montano tutti gli altri sottosistemi: sono applicate le forze aerodinamiche di Lift e Drag. Comprende le masse di tutti i componenti non presenti negli altri sottosistemi.
d. Barre antirollio anteriore e posteriore:
Genera una coppia che si oppone al rollio della vettura, simulando la torsione della barra attraverso una Joint-Force.
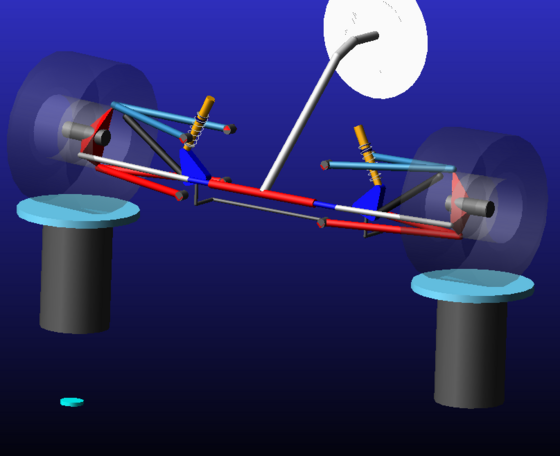
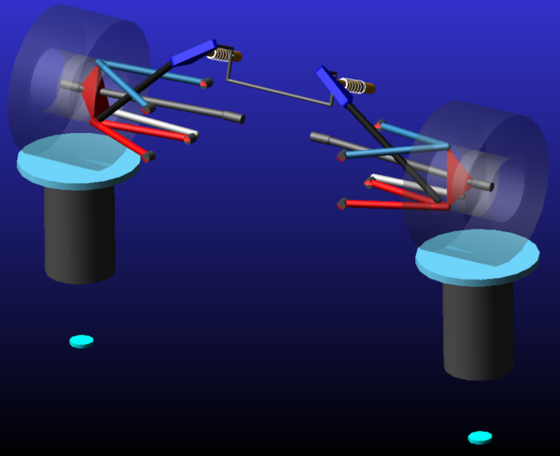
e. Sospensioni anteriore e posteriore:
Le geometrie delle sospensioni sono caratterizzate da un layout di tipo double-wishbone, in cui sono implementate le curve caratteristiche delle molle e degli ammortizzatori. Inoltre, grazie alle Adjustable Forces, è possibile settare il camber e la convergenza della vettura.
f. Sistema di sterzo:
Una volta modellata la geometria, è stata posta particolare attenzione al Reduction Gear presente tra il piantone di sterzo e la cremagliera, con lo scopo di ottenere il rapporto di sterzo di progetto.
g. Ruote:
Grazie ai dati forniti dal FSAE Tire Test Consortium, ottenuti grazie a test sperimentali, è stato creato un modello di Pacejka PAC 2002 semplificato, caratterizzato da un file di testo in cui sono implementati i coefficienti di Pacejka e le caratteristiche dello pneumatico.
h. Motore:
È stata usata una configurazione di tipo Robotized Dual-Clutch. Essa prevede l’implementazione di una spline generalizzata della curva di coppia del motore, una frizione che garantisce una modulazione della coppia ed un controllo della velocità del motore (avvicinandosi al comportamento del cambio sequenziale presente sulla vettura), un modello di trasmissione semplificato in cui sono applicati i rapporti di cambio a seconda della marcia inserita e, infine, un differenziale costituito da due parti rotative che si connettono ai semiassi delle sospensioni posteriori.
Tutti i corpi sono modellati come corpi rigidi e tutti i collegamenti sono ideali.
Una volta ottenute le geometrie dei sottosistemi, sono stati implementati tutti i dati caratteristici, validati con le simulazioni.
2. Simulazione e comparazione con dati di telemetria
La seconda parte dell’elaborato consiste nella validazione del modello: sono state lanciate delle simulazioni con lo scopo di ottenere dei dati da confrontare con quelli di telemetria.
Le simulazioni lanciate sono state varie, alcune focalizzate sul comportamento dei sottosistemi, in modo da validarli singolarmente, altre, invece, sull’interazione dei vari sottosistemi tra loro, concentrandosi sul comportamento della vettura completa.
a. Simulazioni specifiche dei sottosistemi
Sono state lanciate simulazioni di accelerazione e frenata, confrontando i dati aerodinamici, ovvero la Downforce e la Drag sviluppate dalle ali e dal telaio, le coppie frenanti sviluppate dall’impianto frenante e i valori di velocità e giri del motore alle varie marce, in modo da verificare che la curva di coppia del motore ed il Final Drive Ratio fossero coerenti.
b. Ruote
Sono state studiate le forze a terra sviluppate dagli pneumatici, confrontando i grafici ottenuti con quelli presenti sul sito del FSAE Tire Test Constortium.
c. Sospensioni
Sono state lanciate simulazioni di scuotimento, rollio e sterzata (quest’ultima solo per le sospensioni anteriori), con lo scopo di studiare la cinematica dei sistemi sospensivi e verificarne il comportamento. Sono stati studiati i valori di carreggiata, delle percentuali di Anti-Dive per l’anteriore, Anti-Squat per il posteriore, e dei valori dell’angolo di caster, dell’avancorsa a terra, dell’angolo di kingpin e del braccio a terra laterale per la sospensione anteriore, confrontando i valori ottenuti con i dati di progetto. Infine, è stato studiato l’Installation Ratio, per verificare che il comportamento della sospensione fosse coerente con la progettazione effettuata dal team.
d. Simulazioni Full-Vehicle
Il team ha eseguito dei test di steering pad e endurance, per studiare le performance della vettura: di conseguenza, sulla base di ciò, sono state lanciate delle simulazioni di Constant Radius Cornering e Smart Driver.
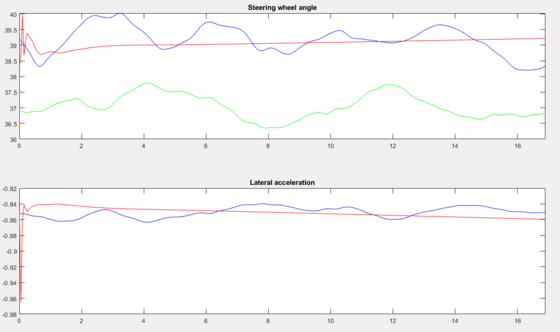
d.1 Constant Radius Cornering
Le simulazioni di Constant Radius Cornering sono state eseguite impostando il raggio di curvatura, i valori iniziale e finale dell’accelerazione laterale e la marcia inserita, ottenuti dai dati di telemetria. Lo scopo delle prove è stato quello di valutare il comportamento della vettura al variare delle rigidezze delle barre antirollio, studiando il sottosterzo ed il sovrasterzo della vettura. I risultati ottenuti sono molto vicini a quelli dei test.
d.2 Endurance
La prova di Endurance consiste nell’eseguire dei giri di un tracciato costruito dal team. Come prima cosa, è stato implementato il tracciato attraverso l’apposito tool di Adams Car, sfruttando i dati del GPS ottenuti dalla telemetria.
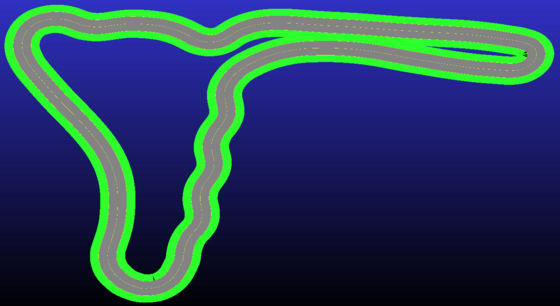
Successivamente è stata lanciata una simulazione di tipo Smart Driver, considerando un giro di pista.
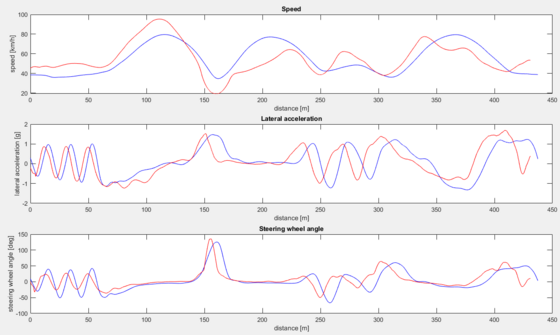
I valori sono vicini alla realtà, ad eccezione del comportamento della vettura in prossimità della curva più lenta del tracciato e del tempo impiegato per percorrere un giro, che risulta leggermente minore: i motivi sono legati alla modellazione e alla traiettoria percorsa nel programma.
3. Conclusioni
È possibile effettuare alcune migliorie:
- Introdurre i corpi flessibili;
- Sostituire i vincoli ideali con vincoli reali;
- Aumentare il livello di dettaglio del modello del motore;
- Migliorare il modello degli pneumatici, acquisendo dati con test in laboratorio;
- Ampliare le tipologie di test in pista per migliorare la modellazione di tutti i componenti;
- Implementazione di un pilota virtuale, il cui comportamento si avvicini a quello reale.
Tuttavia, nonostante le semplificazioni adottate, il modello multibody costituisce una buona base da cui partire per la progettazione della vettura dell’anno successivo.
Autore: Antonio Adamo
Relatore: Professore Silvio Sorrentino
Anno accademico: 2019/2020