Impostazione di modello multibody per un veicolo basculante a quattro ruote
Università di Modena
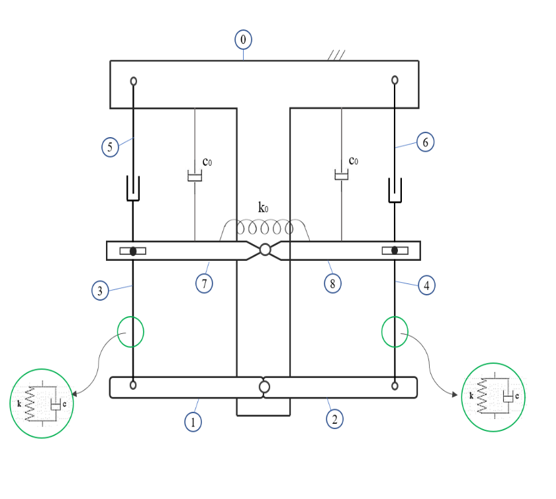
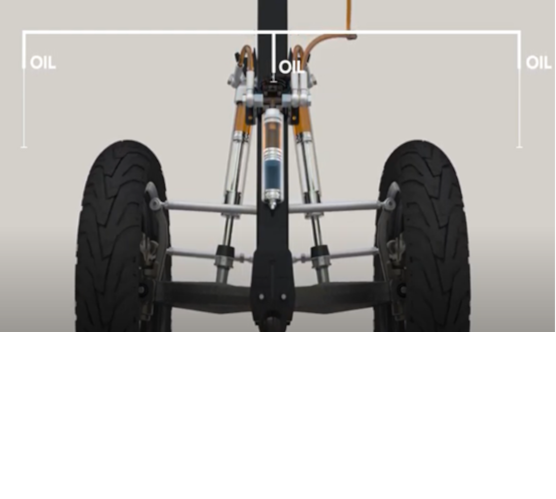
L’attività di tesi è stata svolta in collaborazione con un’azienda produttrice di veicoli basculanti. In particolare, è stato analizzato e creato un modello multibody del veicolo basculante a quattro ruote della suddetta casa costruttrice. Si tratta di un veicolo non convenzionale in quanto è una via di mezzo tra una motocicletta e un’autovettura. Infatti, pur presentando quattro ruote, le sue sospensioni brevettate gli consentono di rollare con angoli paragonabili a quelli dei veicoli a due ruote. Tuttavia, i sistemi sospensivi presenti sia all’anteriore sia al posteriore non sono meccanici, ma bensì idropneumatici. Per questa ragione, si è deciso inizialmente di ideare un modello meccanico equivalente, come approfondimento dell’analisi condotta per comprenderne meglio il funzionamento e per facilitarne la modellazione. Come è facile intuire, l’attività si è quindi focalizzata principalmente sullo studio e sulla riproduzione delle sospensioni.
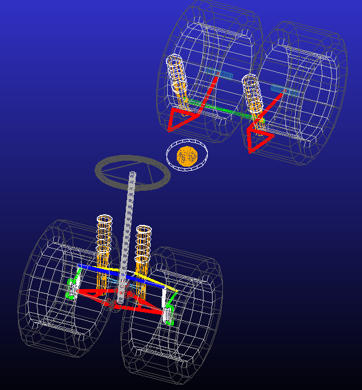
Una volta concluse le analisi preliminari e di caratterizzazione di questi sistemi, si è scelto di modellare il veicolo all’interno dell’ambiente Adams Car. Nello specifico si sono creati i template delle sospensioni anteriore e posteriore, sterzo e un modello concettuale rappresentante l’intera trasmissione e il motore monocilindrico.
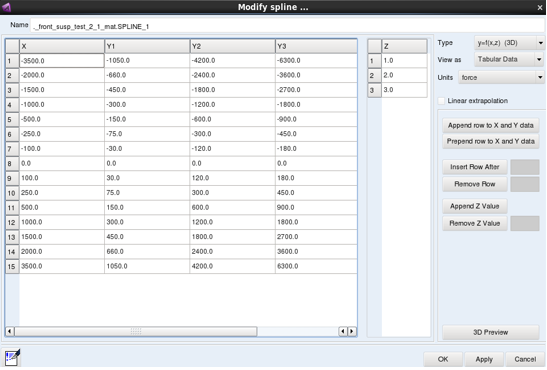
Nel caso particolare delle sospensioni, si è ricreato il modello equivalente all’interno del Template Builder, inserendo dei tradizionali ammortizzatori, costituiti da molle e smorzatori. Inoltre, per riprodurre più fedelmente il comportamento reale di questo veicolo basculante, si è deciso di sfruttare le potenzialità del software tramite l’introduzione di attuatori. Più precisamente, si è deciso di governarli mediante la formulazione di due funzioni diverse, generando così due versioni differenti dello stesso modello. Ciascuna di queste è adatta allo sviluppo di determinati casi di studio. Infatti, per esempio, in un primo modello si è impostata la funzione spline 3D, che è capace di variare la relativa risposta delle sospensioni in funzione della simulazione di interesse, ovvero a seconda che si analizzi il solo rollio del veicolo o il solo beccheggio, generato da un’accelerazione o da una frenata.
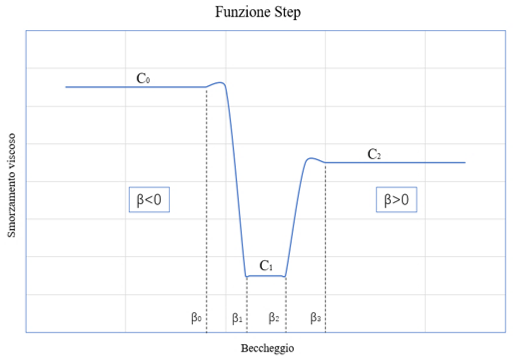
Nel secondo caso, invece, si è introdotta una funzione step in grado di modulare la risposta del mezzo in base all’ampiezza dell’angolo di beccheggio dell’intero veicolo. In questo modo è possibile simularne il comportamento, assunto durante l’esecuzione di successive manovre diverse.
Per quanto riguarda l’anteriore, sono stati riprodotti anche i tiranti di sterzo, di camber, nonché il sistema di sterzo. Per evitare eventuali problemi con il file driver del codice, si è adattato il modello preesistente di sterzo per autovetture, rendendolo similare a quello oggetto di studio.
Invece, per ovviare alla grande complessità intrinseca della modellazione dell’intero sistema di trasmissione, si è optato per l’impiego del template motore-cambio già presente all’interno del database di Adams Car. In particolare, sono stati inseriti i dati reali per meglio caratterizzarlo, si è emulato il cambio CVT e infine, con opportuni rapporti di trasmissione, si è valutata e rappresentata l’intera trasmissione.
Per ultimo, si sono assemblati i vari template nello Standard Interface, completando così la creazione del modello dell’intero veicolo.
Chiaramente il progetto svolto risulta essere un’impostazione di modello multibody, in quanto manca la modellazione, per esempio, degli pneumatici che consentono ampi rolli durante la percorrenza di curve simulate, o la modellazione più dettagliata della trasmissione, da cui è possibile tenere conto degli effetti giroscopici. Tuttavia, tramite alcune prove, si è concluso che il software Adams Car, per le molteplici funzionalità di cui dispone, è in grado di rappresentare e analizzare anche veicoli non convenzionali, come quello preso in esame.
Autore: Benedetta Tocci
Relatore: Prof. Silvio Sorrentino