Analisi lineare di modelli multibody di motocicletta a complessità crescente
Università di Modena e Reggio Emilia
Introduzione
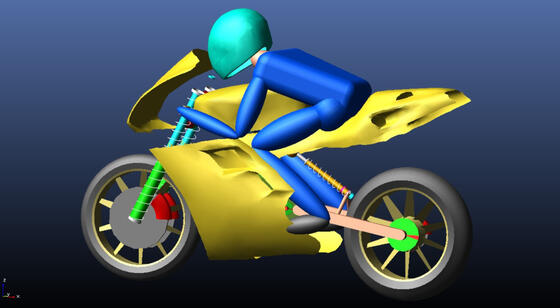
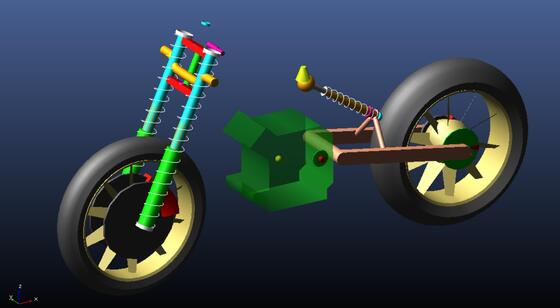
Il lavoro di tesi, svolto in ambito accademico presso Unimore, ha riguardato l’analisi modale di una motocicletta ad alte prestazioni attraverso l’utilizzo di un modello multibody con l’ausilio del software Adams.
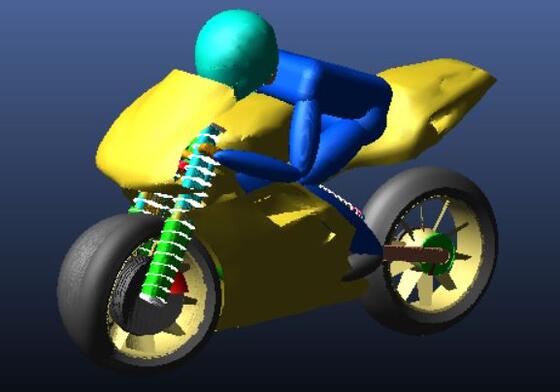
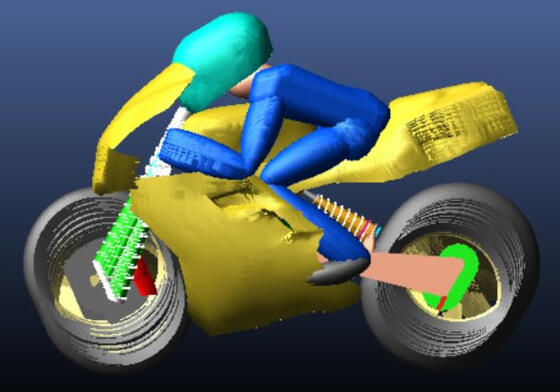
I fenomeni riportati sono stati studiati mediante analisi lineare di un modello multibody ottenuto a partire da uno dei modelli presenti nel database del software VI-Motorcycle. In particolare, il modello di motocicletta comprende i sotto-assiemi riguardanti la sospensione anteriore, della tipologia a forcella telescopica, il telaio, la sospensione posteriore, con forcellone e rinvio sull’ammortizzatore, il powertrain, la trasmissione a catena, il sistema frenante, gli pneumatici, modellati mediante una formulazione di tipo PAC-MC, la scocca e il pilota. Tutti i componenti sono modellati come corpi rigidi e il pilota è solidale alla moto, quindi non viene considerato un suo possibile contributo in termini di movimento sulla dinamica del veicolo.
Lo strumento utilizzato è stata l’analisi Weave/Wobble Linear Analysis, che permette di linearizzare, mediante il modulo Adams Linear, il modello in una certa configurazione di rilievo e calcolarne autovalori e autovettori, consentendo così di investigare l’influenza di vari parametri sui modi di vibrare del sistema, nonché la variazione dei fattori di partecipazione dei singoli stati a seconda delle manovre impegnate.
Metodo e risultati
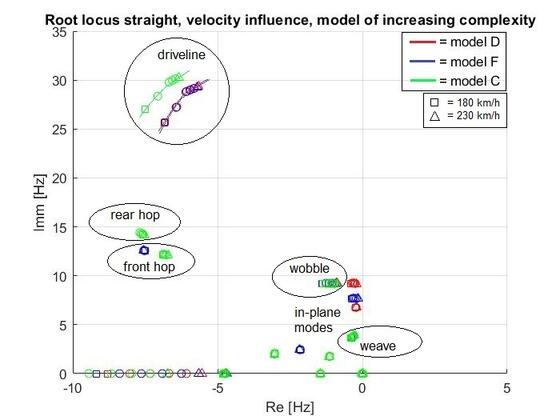
Al fine di realizzare uno studio step by step, sono stati considerati quattro modelli di complessità via via crescente, partendo da una versione base con sospensioni bloccate e trasmissione a catena resa rigida (modello B), per poi passare a sbloccare via via prima la trasmissione (modello D), poi la sospensione anteriore (modello F), e infine la sospensione posteriore (modello C).
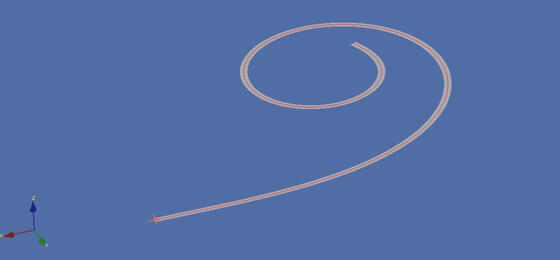
Questi modelli sono stati studiati in due particolari manovre di interesse: moto rettilineo a velocità costante, moto in curva a velocità costante e angolo di rollio che aumenta durante la percorrenza della manovra, seguendo un tracciato a spirale realizzato attraverso il modulo VI-Road e controllando il modello mediante la logica e i parametri contenuti nel pacchetto VI-EventBuilder. Le manovre interessate sono manovre stazionarie o quasi-stazionarie, in cui ha senso eseguire una linearizzazione del modello ai fini dell’analisi modale.

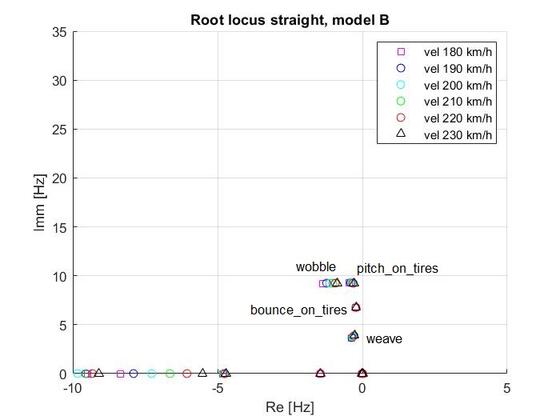
Linearizzando i modelli in più configurazioni e nei due casi di manovra, è stato possibile indagare quali sono e come variano i modi propri di una motocicletta in funzione, oltre che della complessità del modello, anche di parametri quali velocità di percorrenza e angolo di rollio. Analizzando i risultati mediante un luogo delle radici e utilizzando in parallelo dei modelli analitici minimi di confronto, sono state indagate le variazioni dei modi propri in termini di frequenza e smorzamento, come di seguito riportato prima per il caso B e poi mettendo a confronto i restanti modelli.
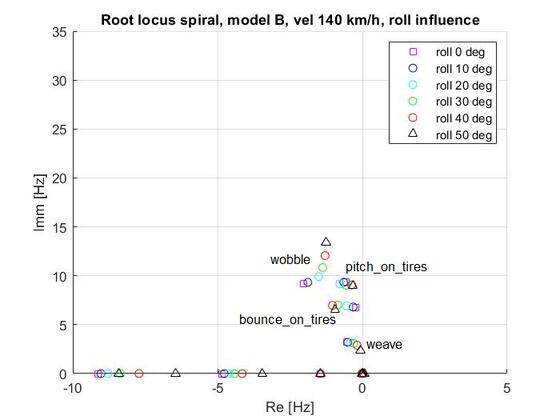

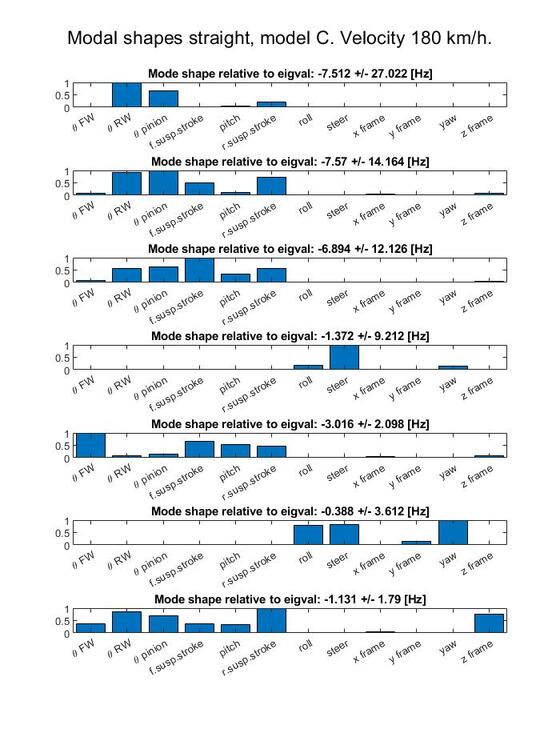
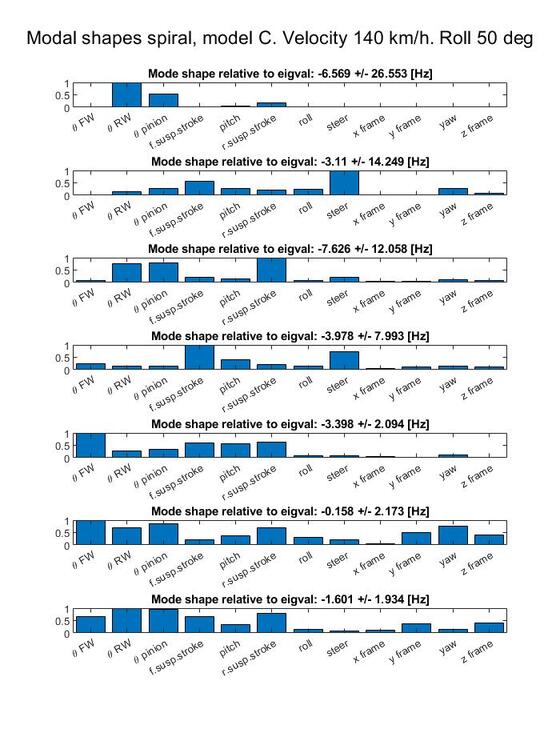
Le corrispondenti forme modali, disponibili nel PostProcessor di Adams sotto forma di animazioni (di seguito le animazioni sono riferite ai modi di wobble e pitch on tires per il modello B), sono state inoltre elaborate selezionando opportunamente gli stati principali del modello, per darne una visualizzazione in forma di istogrammi (come di seguito riportato per il modello C nelle due rispettive manovre di interesse) che evidenziano gli stati maggiormente interessati per ciascun modo rilevato. Si può osservare come, mentre nel caso rettilineo, a ciascun modo di vibrare corrisponde una prevalente partecipazione di uno o pochi stati associati, quando la moto assume un ampio rollio, le forze a terra agenti sugli pneumatici influenzano fortemente il comportamento del veicolo e accoppiano la dinamica out-of-plane con quella in-plane, coinvolgendo una partecipazione non trascurabile di gran parte degli stati del modello.
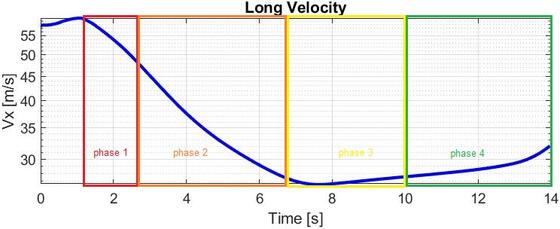
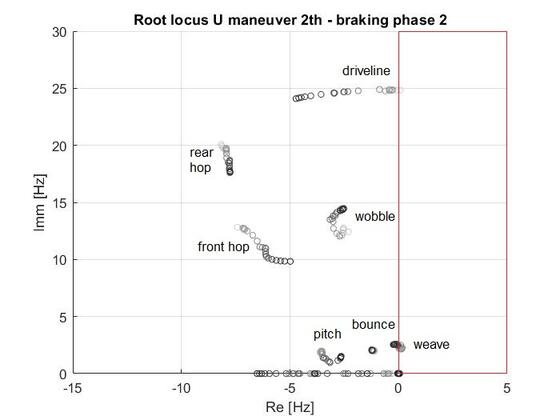
Un ulteriore caso di interesse riguarda l’influenza della forza frenante sulla stabilità dei modi della motocicletta. In particolare, è stata considerata una manovra di percorrenza ad ‘U,’ facendo seguire al modello un opportuno profilo di velocità, di seguito riportato assieme ad una cattura del tracciato.

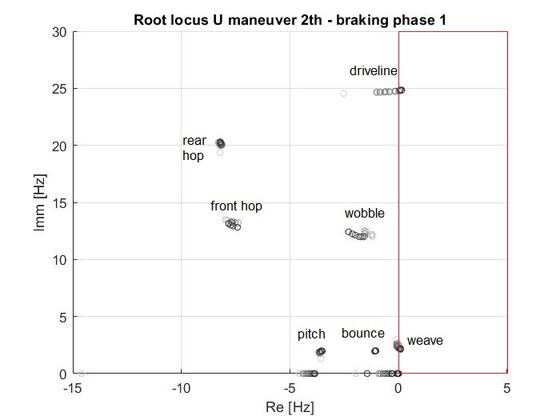
È interessante notare come la distribuzione delle forze frenanti tra la ruota anteriore e posteriore possa influire negativamente sulla stabilità di alcuni modi: utilizzando il solo freno anteriore e la coppia frenante data dal motore, con un rapporto innestato corrispondente alla seconda marcia, quando la moto si trova nell’intorno della massima decelerazione e con un angolo di rollio rilevante, oltre al modo di weave, molto sensibile alle variazioni di rigidezza dei pneumatici, anche il modo di driveline può diventare instabile, per poi ritornare a stabilizzarsi quando lo sforzo frenante torna a ridursi. A tal fine si riporta di seguito l’analisi della fase di frenata, per il solo modello C, suddivisa in due step in cui l’evoluzione dei modi durante la manovra è contrassegnata da un colore via via più scuro.
In alcune situazioni di manovra in cui la moto è inclinata, l’interazione tra i modi in-plane e i modi out-of-plane dà luogo a dei modi che possono diventare instabili e questi non sono stati ancora indagati in maniera esaustiva. Uno strumento multibody di questo tipo, affiancato a dei modelli semplificati, può aiutare la ricerca ad investigare tali fenomeni dannosi per le prestazioni del veicolo.
Conclusioni
In definitiva, la modellazione del multibody con l’ausilio dei software Adams e VI-Motorcycle, mediante analisi di complessità crescente, ha permesso di esaminare prima di tutto quali sono i modi principali che descrivono la dinamica di un motociclo, ma soprattutto ha evidenziato la forte dipendenza di questi modi dalle caratteristiche del modello, oltre che dal tipo di manovra esaminata.
I modi quali front hop, rear hop, bounce, pitch e driveline, che sono modi in-plane, hanno evidenziato delle variazioni interessanti nella percorrenza di una curva, che invece non vengono riscontrate in rettilineo. Analogamente, i modi di wobble e weave, che sono modi out-of-plane, presentano una tendenza nell’evoluzione quasi opposta se analizzati in curva piuttosto che in rettilineo. Si sottolinea il fatto che, in questo lavoro, è stata prestata attenzione anche al modo di driveline, che spesso viene invece trascurato nelle trattazioni in ambito motociclistico, ma che rappresenta un fattore importante sull’influenza delle prestazioni dei veicoli con trasmissione a catena.
Le analisi e i risultati ottenuti sono comunque di notevole complessità e spesso l’andamento di questi modi non è facilmente intuibile con l’utilizzo di modelli semplificati; è proprio in queste situazioni che un modello multibody di questa complessità gioca un ruolo e una rilevanza notevole rispetto ai modelli analitici minimi, poiché vengono contemporaneamente tenuti in considerazione numerosi fattori, dalle caratteristiche dei pneumatici in diverse condizioni di utilizzo, alla geometria del punto di contatto, all’influenza dello sterzo, alle proprietà delle sospensioni, nonché il controllo attuato per guidare il modello nella simulazione. Proprio a tale scopo, infatti, è stato importante partire dal modello base B e poi aggiungere un elemento di complessità alla volta, fino al modello completo C, per cercare di inseguire passo dopo passo i ragionamenti che, seppur in maniera qualitativa, potessero portare a spiegare i risultati ottenuti. Questi risultati, in alcuni casi, sono difficilmente raggiungibili con analisi semplificate, a causa della vicinanza tra più modi di vibrare, come avviene nel caso del rear hop e front hop, o del front hop e del wobble, che si influenzano a vicenda e, in alcune circostanze portano i due modi ad una sorta di coalescenza, ovvero non sono più interpretabili come tali, ma tendono fortemente ad interagire e sovrapporsi. In questo senso, quindi, viene sottolineata la superiorità di un modello multibody al software rispetto ai modelli minimi, senza comunque negare l’importanza di quest’ultimi, in assenza dei quali sarebbe molto difficile interpretare i risultati e acquisire un metodo in grado di gestire e prevedere sviluppi e miglioramenti.
Autore: Armando Lorenzo Caiaffa