Analisi multibody di una vettura di Formula SAE dotata di differenziale semi attivo
Università di Firenze
Negli ultimi decenni sono stati sviluppati e introdotti numerosi sistemi di supporto al guidatore che, intervenendo in quasi tutte le situazioni critiche di marcia, hanno permesso l’incremento del livello di sicurezza al volante.
A partire dagli anni ’90, con l’avvento del primo dispositivo ESP commerciale, l’evoluzione e la diffusione sulle auto commerciali è continuata senza sosta.
Nelle vetture particolarmente performanti questo aspetto si scontra però con un’altra tematica cruciale, quella della trazione. Tali sistemi infatti garantiscono il controllo della dinamica agendo direttamente sul sistema frenante e sul propulsore ma limitano notevolmente la potenza trasmessa a terra.
Per tale motivo dal 2011 il Firenze Race Team (FRT), squadra di Formula SAE dell’Università degli Studi di Firenze, si è concentrato sulla progettazione di un innovativo differenziale semi attivo (SAD - Semi Active Differential) che permetta di migliorare le caratteristiche dinamiche della vettura senza influire sulle prestazioni. La peculiarità del dispositivo è infatti quella di modificare la ripartizione di coppia fornita ai due semiassi in maniera continua permettendo così la generazione, come ulteriore effetto, di una coppia imbardante utile al controllo del comportamento della veicolo.
L’obiettivo della tesi è stato quello di implementare il differenziale nel modello della vettura e di valutare i suoi effetti sulla dinamica di marcia. L’analisi è stata condotta testando varie logiche di controllo e replicando alcune manovre tipicamente adoperate per investigare il comportamento della vettura.
Modellazione
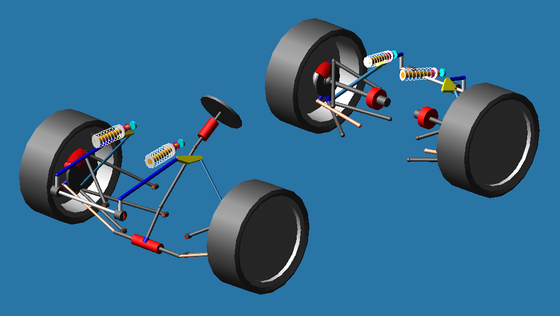
Nel presente lavoro di tesi si è analizzato l’influenza del dispositivo sul comportamento del veicolo senza porre l’attenzione sui reali effetti che si instaurano all’interno del differenziale stesso; per tale motivo si è preso la decisione di utilizzare un approccio di modellazione semplificato. Il vantaggio risiede nella possibilità di ridurre la complessità del modello ed il costo computazionale delle simulazioni, facilitando la fase di ottimizzazione della legge di controllo.
Il differenziale è quindi da considerarsi come una black-box con un ingresso (l’albero di trasmissione) e due uscite (i semiassi). Per garantire una differente ripartizione di coppia alle due ruote motrici, stabilita dal sistema di controllo, si è applicato un attuatore ad ogni semiasse capace di esercitare una coppia di valore pari a quello indicato dalla legge di controllo. Infatti uno degli aspetti principali di questo dispositivo riguarda il fatto che il suo comportamento, e di conseguenza il comportamento dell’intero veicolo, è fortemente influenzato dalla logica di controllo che viene utilizzata. Per tale motivo durante questa attività si è voluto studiare anche l’influenza di tre differenti algoritmi definiti e selezionati in una fase precedente del lavoro.
La necessità di testare le logiche e di effettuare eventuali modifiche ci ha spinti verso un particolare approccio di modellazione detto di co-simulazione. Abbiamo quindi utilizzato i plug-in Mechatronics e Controls di ADAMS/Car forniti da MSC.Software che permettono, durante le simulazioni, di affiancare al software multibody un ulteriore software nel quale viene descritta la logica di controllo (nel nostro caso si è adoperato il software Matlab-Simulink di MathWorks). Questo tipo di approccio, nonostante abbia dei limiti dal punto di vista della rapidità con cui vengono completate le simulazioni, permette di esercitare un controllo ed eventualmente intervenire sulla logica in maniera molto semplice e per tale motivo è particolarmente indicato nella fase iniziale di sviluppo.
La necessaria comunicazione tra i due ambienti è garantita da segnali input/output definiti in ADAMS. Nel caso in analisi si è preso la decisione di tenere in considerazione solamente grandezze che effettivamente possono essere controllate da sensori presenti a bordo del veicolo. In particolare si sono considerati i seguenti segnali:
Input al sistema di controllo:
- Percentuale di apertura del corpo farfallato
- Velocità angolare del motore
- Marcia inserita
- Differenza di velocità angolare delle ruote motrici
- Velocità di imbardata
Output al sistema di controllo:
- Coppia fornita dagli attuatori
Test e analisi risultati
Il comportamento dinamico è stato valutato considerando quattro manovre principali: SkidPad, Sine Sweep, Sine with Dwell e μ-split acceleration.
Per quanto riguarda le logiche sono stati considerati due algoritmi che permettono di replicare il comportamento di altrettanti differenziali autobloccanti (Limited Slip Differential e Viscoso) che appartengono a differenti famiglie (Torque e Speed Sensitive rispettivamente). La terza logica invece è stata definita in maniera specifica per questo tipo di differenziale come diretta evoluzione del comportamento di un LSD.
Queste analisi hanno permesso in primo luogo di verificare come intervenendo sul differenziale SAD sia possibile influenzare il comportamento dinamico della vettura.
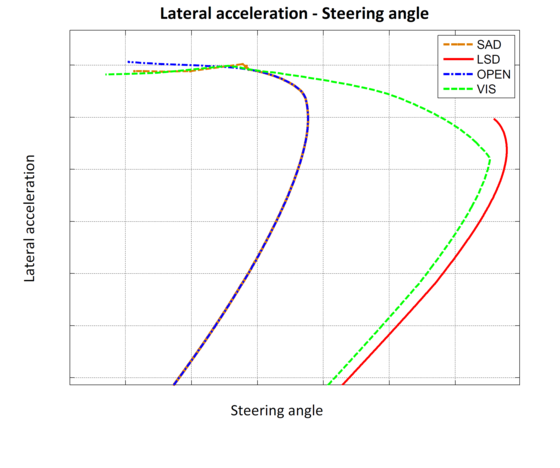
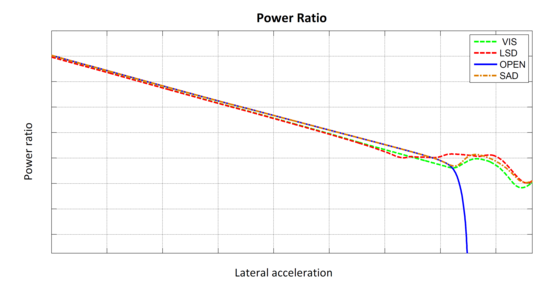
Inoltre, concentrandosi sulle logiche di controllo, si è potuto dimostrare come effettivamente gli algoritmi che emulano il comportamento dei differenziali autobloccanti permettono un aumento della capacità di trazione della vettura ma determinano, come svantaggio, il peggioramento delle doti di guidabilità oltre a rendere meno prevedibile il comportamento.
La terza legge di controllo invece ha ottime caratteristiche poiché favorisce un miglioramento delle doti direzionali mantenendo un’elevata capacità di trazione.
L’attività qui descritta è da considerarsi come il primo passo del processo di sviluppo di questo sistema che sarà poi seguito da una fase di ottimizzazione al banco prova, prima che avvenga l’installazione a bordo del veicolo.
Francesco Vinattieri
Relatori
Prof. Ing. Renzo Capitani
Prof. Ing. Marco Pierini
Ph.D. Ing. Claudio Annicchiarico
Approfondimenti:
http://papers.sae.org/2014-32-0088/