Politecnico di Torino – Dipartimento di Automatica ed Informatica (DAUIN).
Al giorno d’oggi i dispositivi elettronici in campo automobilistico assumono un’importanza sempre maggiore allo scopo di migliorare la facilità e la sicurezza di guida ed il comfort dei passeggeri.
In questa attività di tesi è stata sviluppata, in collaborazione con Magneti Marelli Sistemi Sospensioni Spa, una logica di controllo per una barra stabilizzatrice attiva, in modo da ridurre il rollio della vettura durante la percorrenza in curva.
La vettura scelta come base è stata una FIAT GRANDE PUNTO 1.4 8V.
Modello completo
Al fine di realizzare la logica di controllo è stato dapprima costruito un modello lineare che descrive il comportamento dinamico dell’intero veicolo. Sono state prese in considerazione esclusivamente le dinamiche di rollio e imbardata trascurando, sotto opportune ipotesi semplificative, i fenomeni di beccheggio.
E’ stata scelta una rappresentazione nello spazio degli stati, che sono:
- Angolo di scorrimento laterale del veicolo.
- Velocità di imbardata
- Angolo di rollio
- Velocità di rollio
In ambiente MATLAB/SIMULINK e si è passati all’implementazione dello stesso.
Le grandezze in ingresso al modello sono:
- Angolo di sterzo imposto dal guidatore
- Coppia Antirollante, necessaria alla riduzione del rollio della vettura, generata dal controllo.
Le uscite del modello sono:
- Accelerazione laterale
Per verificare la bontà del modello utilizzato, sono state simulate le manovre classiche di handling:
- Colpo di sterzo
- Steering Pad.
- Colpo dell’alce.
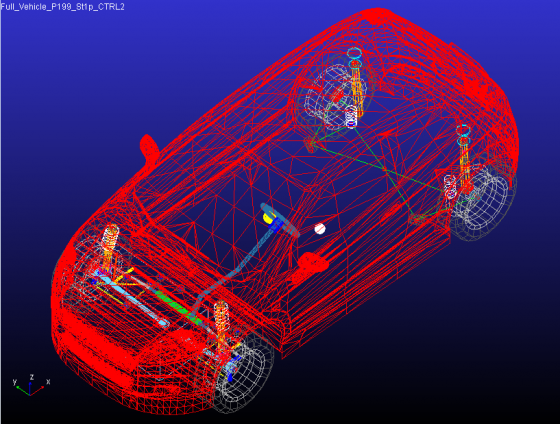
Il modello lineare è stato validato utilizzando un modello di veicolo completo MSC ADAMS/CAR®.
Il modello complessivo (assembly) è costituito da vari sottosistemi (subsystem) comprendenti:
- Sistema sospensivo anteriore
- Sistema sospensivo posteriore
- Barra Antirollio anteriore
- Blocco motore e cambio
Angolo di rollio
Nella realizzazione delle sospensioni anteriore e posteriore sono stati considerati anche strutture flessibili. La barra attiva è stata modellata inserendo al centro della struttura un punto di ingresso per la coppia antirollante generata dalla logica di controllo.
In particolare sono stati confrontati i risultati ottenuti con i due modelli, eseguendo le tre varianti di manovra dell’alce.
A partire dal modello validato è stata sviluppata la logica di controllo.
Supponendo di avere a disposizione esclusivamente misure di accelerazione laterale, l’approccio innovativo risiede nell’utilizzo del filtro di Kalman per la stima degli stati, che permette una riduzione del numero di sensori utilizzati.
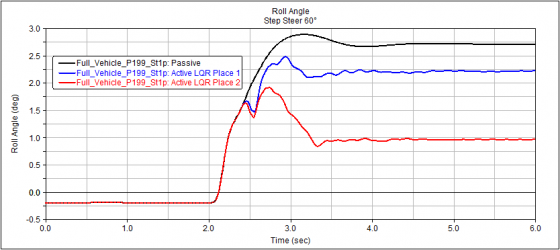
Il passo successivo è stato quello di creare un controllore utilizzando l’approccio Linear Quadratic Regulator. Tramite la scelta di opportune matrici Q e R (la prima che penalizza il valore del rollio e la seconda che determina l’entità dell’azione di controllo) è stato ottenuto il momento antirollante necessario per ridurre il movimento di rollio durante la percorrenza in curva della vettura.
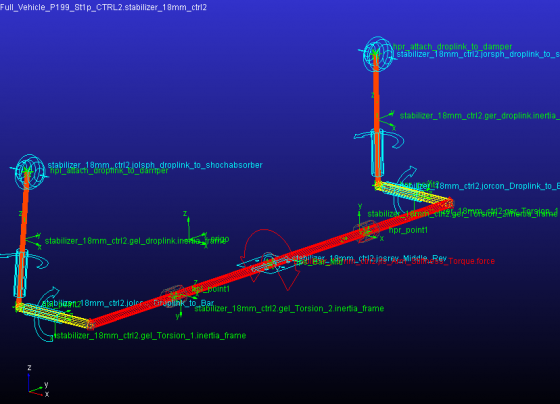
Barra antirollio attiva
La presenza di una specifica di progetto riguardo il valore minimo di accelerazione laterale, che determina la soglia di intervento, può generare in determinate condizioni delle attivazioni non desiderate del modulo antirollio. A tal proposito sono state proposte varie soluzioni per fare fronte a questo tipo di problema.
Infine, la logica di controllo progettata a partire dal modello lineare è stata adattata per il controllo di un modello non lineare di veicolo completo ADAMS/CAR®. Il plugin ADAMS/Control® ha permesso l’integrazione del controllore progettato con il modello di veicolo completo.
Sono state definite ed eseguite alcune manovre di handling e sono stati confrontati i valori del rollio nel caso attivo e passivo. Per migliorare le caratteristiche di risposta del sistema controllato si è cercato di trovare il legame che intercorre tra la scelta dei valori delle matrici Q e R e l’andamento dell’angolo di rollio. A tal proposito sono state considerate due soluzioni e sono stati confrontati i risultati ottenuti.
Tesi di Laurea di: Alessio Meli
Relatore: Prof. Stefano Malan, Piero Monchiero – Product Developlment Director – Magneti Marelli SISTEMI SOSPENSIONI