Politecnico di Torino - Department of Mechanical and Aerospace – Team Policumbent
- Vehicle mass
- Wheelbase
- Track
- Tire radius
- Cg position
- Roll center position
- Initial roll angle
- Longitudinal acceleration
- Lateral acceleration
|
Camber Angle (degree) |
Rollover Lateral Acceleration Threshold (g) |
Difference According to +2.5° Camber Angle |
|
+2.5 |
0.8802 |
0,00 % |
|
0 |
0.9052 |
2,50 % |
|
-2.5 |
0.9318 |
5,16 % |
Table 1: The effect of applying different camber angles on front wheels
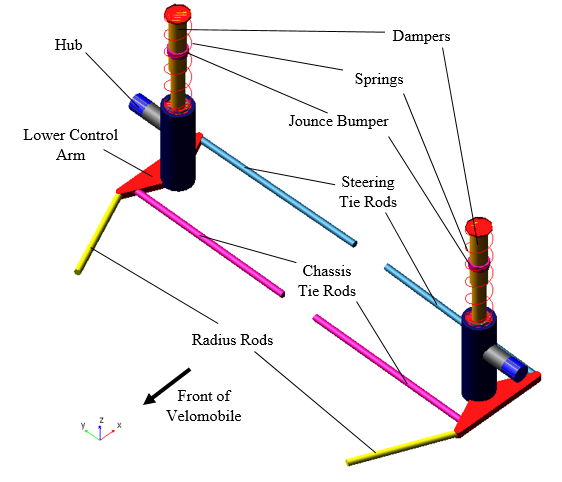
- Front suspension
- Rear suspension
- Steering
- Body
- Front wheel
- Rear wheel
- Powertrain
The rear suspension was designed as monoblade structure which provides the users easy maintenance. It consists of a trailing arm (link), spring-damper system and rear wheel axle.
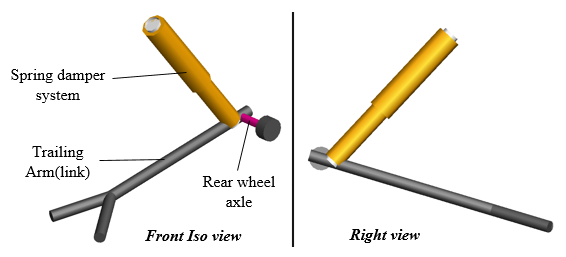
Figure 2: Rear Suspension
To design the steering system for the velomobile, the rack pinion steering template from <acar_shared> database was used firstly. By eliminating rack-pinion and housing part and adding Ackermann Part, velomobile’s steering system was obtained as shown below:
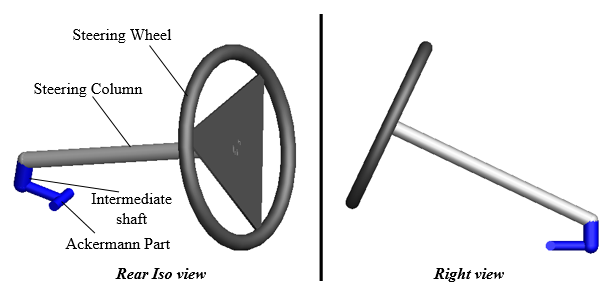
Figure 3: Steering System
During design phase first of all the maximum steering angle was determined by leaving sufficient width for cyclist’s legs and sufficient clearances for the movable parts in the front suspension.
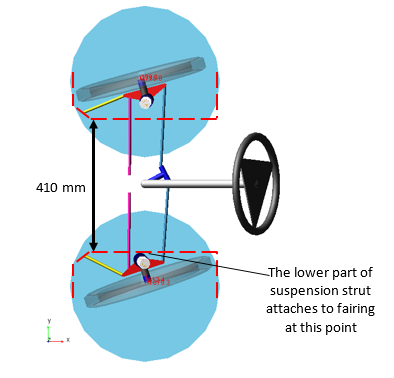
Figure 4: Lower part of the suspension strut attachment point
After modelling all subsystems, the full-vehicle assembly was created in order to analyze the slow-speed maneuverability of the velomobile and then Ackermann Part of steering system was modified until obtaining the desired turn radius (less than 4.5 meters). The aim of the modification of Ackermann part was reducing the Ackermann error.
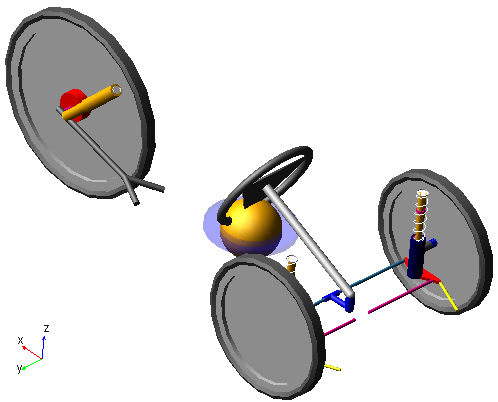
Figure 5: Full-Vehicle Assembly
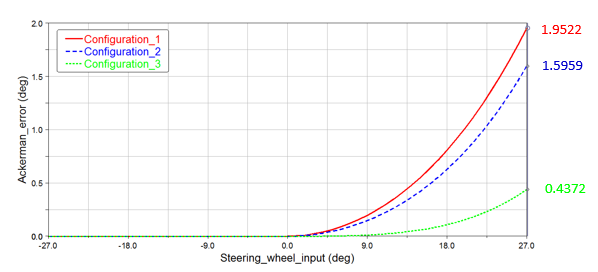
Figure 6: Steering wheel input vs. Ackermann error
Finally three different concerning maneuvers were simulated in order to better understand the rollover dynamics of the velomobile:
Constant Radius Cornering Analysis
- Camber angle
- Turn radius
- Initial longitudinal velocity
- Longitudinal acceleration
- Rollover longitudinal velocity thresholds
- Rollover lateral acceleration thresholds
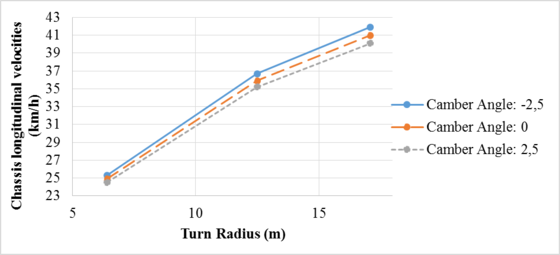
Figure 7: Turn radius vs. Longitudinal velocity threshold according to each camber angle
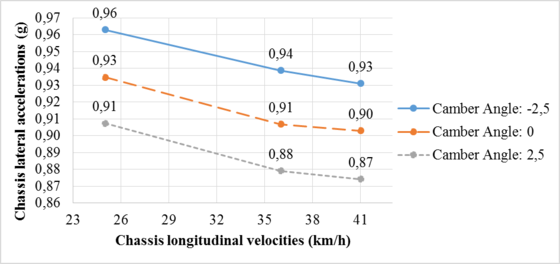
Figure 8: Camber angle vs. Rollover lateral acceleration threshold according to each turn radius
- Camber angle
- Initial steering angle
- Steering angle rate
- Longitudinal velocity
- Rollover longitudinal velocity thresholds
- Lateral acceleration
- Inputs of the model were:
- Camber angle
- Initial steering wheel angle
- Final steering wheel angle
- Step duration
- Rollover longitudinal velocity thresholds
- Roll angle
- Inner wheel normal force
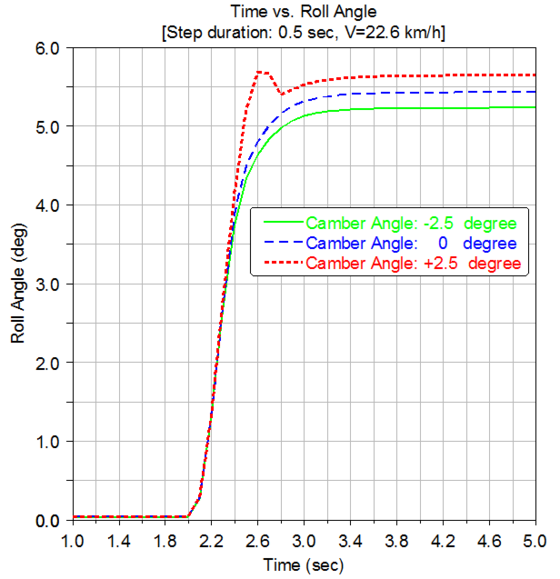
Figure 9: Roll angles at 22.6 km/h according to each camber angle
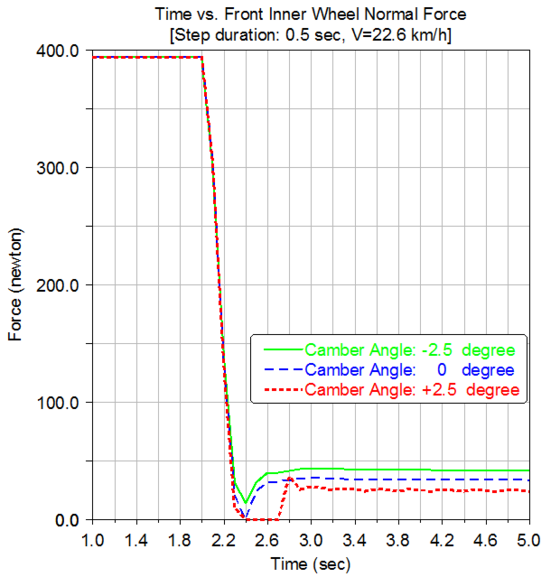
Figure 10: Front inner wheel force at 22.6 km/h according to each camber angle