Politecnico di Torino
Autore: Giorgio Governale
Per ovviare al problema dell’elevato costo di messa in orbita di un qualsiasi modulo spaziale si sono sviluppate, sin dagli anni ’60, strutture di tipo inflatable. Queste sono realizzate tramite uno scheletro rigido pieghevole ed un rivestimento composto di membrane flessibili, che saranno gonfiate una volta raggiunta l’orbita di funzionamento. In questo modo è possibile risparmiare sia sul peso che sul volume occupato all’interno dei lanciatori.
Il software MSC Adams risulta ideale per studiare il collegamento tra la parte flessibile e quella rigida della struttura. Per poter rappresentare al meglio il comportamento delle membrane flessibili, che vanno incontro a deformazioni fortemente non lineari, si è utilizzato il tool MaxFlex, in grado di integrare l’analisi agli elementi finiti non lineari della SOL400 di Nastran all’interno del solver di Adams, senza dover ricorrere a co-simulazioni.
Per il funzionamento del software è necessario importare all’interno di MSC Adams un file bdf generato da MSC Patran contenente esclusivamente i nodi, gli elementi i materiali, le proprietà ed eventuali carichi distribuiti o schede di contatto.
La struttura su cui si basano le analisi principali fa parte del progetto STEPS2, destinato a sviluppare nuovi moduli abitativi sfruttando questa tecnologia.
Modello_rigido
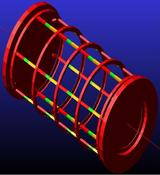
Partendo dal modello rigido analizzato negli studi precedenti se ne è isolata una sezione compresa tra due centine e, dopo alcuni studi preliminari sul solo modello rigido, si è applicato il rivestimento flessibile realizzato tramite software MSC Patran.
Modello_completo
Si sono sviluppati numerosi modelli di membrane, sia per descrivere il comportamento in fase di apertura del sistema, che per quello in fase di chiusura, che risulta essere quello di maggiore interesse dal punto di vista della previsione del comportamento dei corpi flessibili.
Partendo da geometrie semplici e quasi rettilinee, si sono sviluppati modelli via via più complessi, per avvicinarsi il più possibile alle caratteristiche reali della struttura. Per la simulazione si sono effettuate delle semplificazioni geometriche, considerando ad esempio la presenza delle sole strisce longitudinali, trascurando la presenza di quelle circonferenziali.
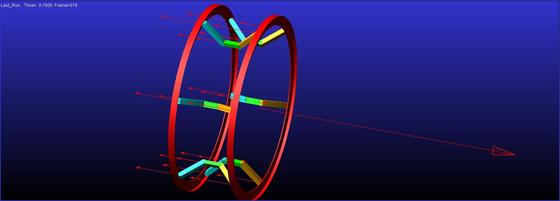
Nel caso di apertura del meccanismo si è simulata la membrana tramite 6 strisce ripiegate la cui larghezza complessiva risulta essere pari a quella delle 62 strisce del caso reale.
Apertura
Nel modello di chiusura si sono potute realizzare tutte le strisce longitudinali a causa della più semplice geometria di partenza, e se ne è analizzato il comportamento con carichi variabili, cercando di evitare l’insorgere di deformazioni eccessive in tempi troppo brevi, per evitare il crash del solutore.
Chiusura
Volendo analizzare altri casi oltre alle strutture di tipo inflatable, si è realizzato un semplice modello di ombrello, avente aste rigide e rivestimento in stoffa realizzato importando un bdf creato tramite il software MSC Patran. La geometria più semplice ha permesso una realizzazione ed un’analisi molto più veloce dei casi precedenti.
Ombrello
Si è inoltre testata la possibilità di imporre carichi di pressurizzazione all’interno del file agli elementi finiti, in modo da avere un carico distribuito su tutta la superficie del corpo, e non delle semplici forze concentrate in corrispondenza degli RBE2. Per questa tipologia di analisi si è utilizzata una semplice piastra incurvata.
Piastra
Lo scopo di questo lavoro non è la determinazione dei carichi agenti su particolari tipi di strutture, o come esse possano reagire a determinate sollecitazioni, ma si tratta di un’esplorazione tecnologica su una nuova funzionalità dei software di calcolo. Nello specifico se ne sono ricercati i limiti e le caratteristiche più utili, al fine di determinare quali siano gli aspetti principali da tenere in conto, qualora si decidesse di approcciare un’analisi multi-body che comprenda l’implementazione di elementi finiti dal comportamento non lineare.
Fattori da considerare:
- Necessità di conoscere sia la geometria del modello multi-body che di quello agli elementi finiti
- Accordo dimensionale tra i due modelli
- Imposizione di forze e tempi di analisi coerenti con il comportamento del sistema
- Definizione di un modello compatibile con le capacità computazionali del computer utilizzato
- Evitare semplificazioni eccessive della geometria che possono portare a risultati imprecisi