Politecnico di Torino – Dipartimento di Ingegneria Meccanica e Aerospaziale
Tesi di Laurea Magistrale di: Alessandro Amorese
Relatori: Prof. Erasmo Carrera, Ing. Marco Petrolo
Il presente lavoro indaga le funzionalità della prototipazione virtuale multidisciplinare, in particolare esplorando le potenzialità dell’interfacciare più software, mostrando punti di incontro o collegamenti, spesso standardizzati, tra sistemi diversi e le modalità per permettere la loro interazione sotto forma di scambio di informazioni.
Nello specifico si vuole analizzare la dinamica di un sistema multicorpo, integrando le caratteristiche di corpi flessibili lineari e non lineari, configurando un accoppiamento tra questo sistema e un modello di controllo esterno. Queste interazioni sono state sviluppate abbinando lo studio della dinamica multicorpo di MSC Adams con le metodologie di analisi agli elementi finiti di MSC Nastran ed infine con la modellazione di sistemi di controllo attraverso MATLAB Simulink, in particolare utilizzando i seguenti tools:
- Adams Flex: consente di integrare corpi flessibili lineari in un sistema multibody importando file di tipo mnf prodotti dalla SOL 103 di Nastran;
- Adams MaxFlex: consente di estendere l’integrazione a corpi flessibili con caratteristiche non lineari importando file di tipo bdf prodotti dalla SOL 400 di Nastran;
- Adams Control: permette di gestire le interazioni tra un sistema di controllo e il sistema multibody, consentendo di elaborare una co-simulazione oppure di importare un modello di controllo attraverso una libreria esterna ESL.
Per testare queste connessioni, è stata scelta un’applicazione attinente all’ambito spaziale, relativa alla problematica di impatto di un lander su un corpo celeste, riprendendo le linee guida di uno studio dell’Agenzia Spaziale Europea (ESA) in merito alla missione Phobos Sample Return.
Il flusso di lavoro seguito consiste nello sviluppo stand-alone di tre modelli rappresentativi del sistema complessivo e nella successiva integrazione graduale di ciascuno di essi:
- Modello multibody: riproduzione di un lander dotato di quattro gambe, un braccio robotico, un’antenna orientabile e pannelli solari dispiegabili;
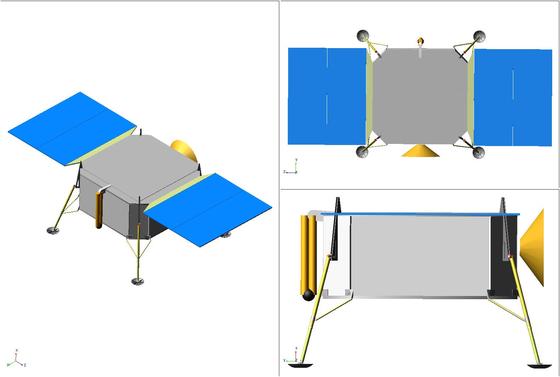
Figura 1: Trittico modello multibody
- Modello strutturale: progettazione di una struttura collassabile da collocare all’interno delle gambe del lander con lo scopo di dissipare l’energia cinetica d’impatto;
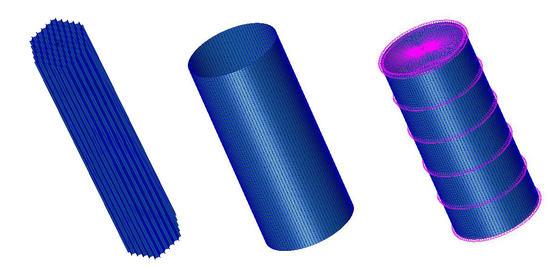
Figura2: Modelli strutturali lineari e non lineari
- Modello di controllo: sviluppo di un sistema di controllo post-impatto che simuli l’azione dei propulsori; essi vengono attivati sia per gestire i rimbalzi del lander sulla superficie, dovuti alla condizione di microgravità del corpo celeste target, sia per limitare la variazione di assetto ed ovviare al rischio di ribaltamento del sistema.
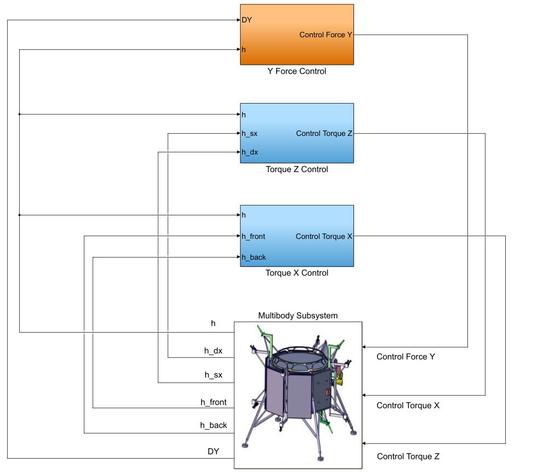
Figura 3: Modello di controllo e co-simulazione
La creazione di un prototipo integrato ha il vantaggio di permettere un’analisi completa del sistema e risponde all’esigenza di prevenire in anticipo eventuali criticità, permettendo di intervenire direttamente in fase di progettazione prima dello sviluppo del prototipo fisica e garantendo quindi un notevole risparmio di risorse e di tempo.
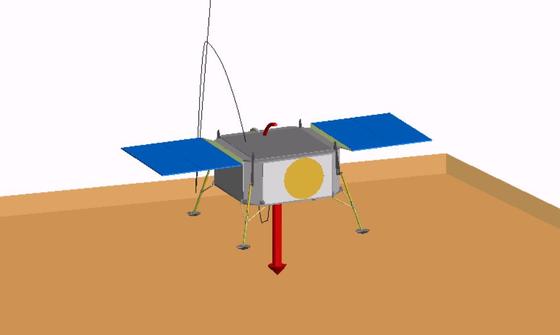
Figura 4: Sistema multibody flessibile controllato
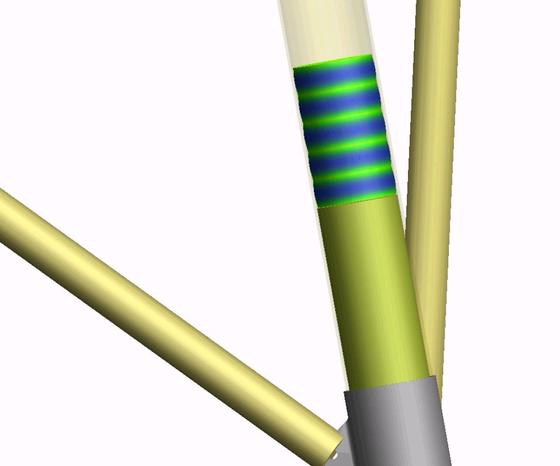
Figura 5: Deformazione del modello strutturale integrato