Politecnico di Torino – Dipartimento di Ingegneria Meccanica e Aerospaziale
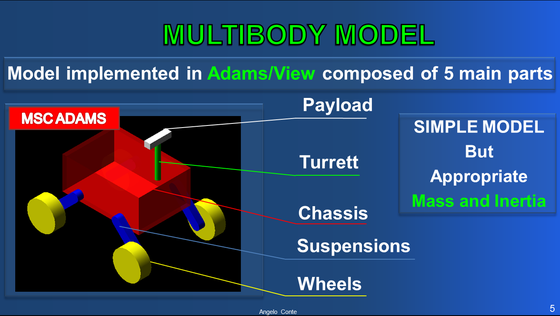
Nell’ambito del Google Lunar X-Prize, team di tutto il mondo stanno sviluppando dei rover per esplorazione lunare per aggiudicarsi il premio in denaro messo in palio da Google. L’Italia partecipa tramite il progetto A.M.A.L.I.A. ed è composto da vari sotto-team, tra cui quello del Politecnico di Torino, il team D.I.A.N.A. grazie al quale è stato sviluppato questo lavoro di tesi. Il lavoro si propone di studiare il comportamento dinamico del rover in differenti situazioni operative, utilizzando un approccio multibody. È stato dunque creato un semplice modello Adams con appropriate caratteristiche in termini inerziali.
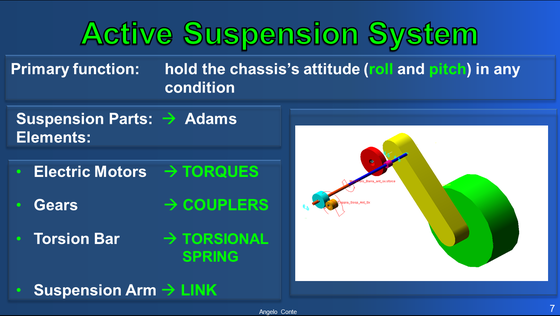
A ciò si è aggiunta una dettagliata modellizzazione delle sospensioni attive, il cui scopo è quello di mantenere stabile l’assetto del corpo centrale del rover in ogni condizione. Per poter svolgere la sua funzione, la sospensione attiva ha necessitato di un sistema di controllo, il quale è stato implementato utilizzando il tool interno di Adams. In accordo con i sensori presenti sul modello reale del rover, sono state ottenute informazioni riguardanti la posizione e la velocità angolare dei bracci delle sospensioni, nonché degli angoli d’assetto dello chassis.
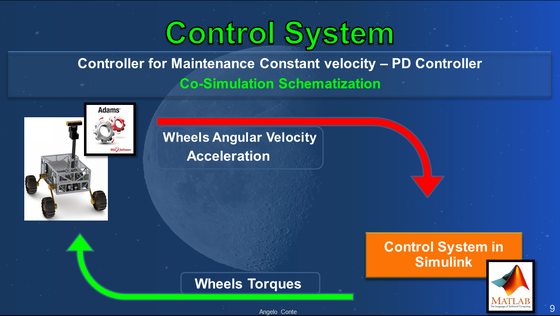
Suddette informazioni hanno caratterizzato l’input del sistema di controllo, di tipologia PID, il quale dopo aver confrontato i valori misurati con dei valori desiderati, forniva in output le coppie necessarie ai motori elettrici delle sospensioni attive. Successivamente è stato implementato un secondo sistema di controllo, questa volta con l’obbiettivo di mantenere costante la velocità di avanzamento del rover in ogni possibile scenario. In questo caso è stato utilizzato un differente approccio basato sulla co-simulazione tra i software Adams e Matlab/Simulink.
Al fine di poter studiare dettagliatamente l’interazione tra le ruote del rover ed un terreno cedevole, si è fatto ricorso al tool SoftSoil il quale, dopo aver impostato opportunamente i parametri caratteristici del terreno lunare, è in grado di determinare informazioni quali le forze di deriva sulla ruota, slittamento, deformazione del terreno ecc.
Le tipologie di terreno sul quale sono state effettuate le simulazioni sono le seguenti:
• Terreno bidimensionale piano
• Terreno tridimensionale con rampa, ad inclinazione sia positiva che negativa
• Mesh tridimensionale, riproducente in modo fedele una porzione della superficie lunare In merito all’ultima tipologia di terreno, la mesh è stata ottenuta gratuitamente dal sito della Nasa ed è stata elaborata al fine di importarla in Adams.
Il rover è stato testato su tutte le tipologie di terreno al fine di studiarne la mobilità in differenti contesti operativi, validando nel contempo i sistemi di controllo implementati.
Tesi di Laurea Magistrale di: Angelo Conte
Relatore: Prof. Giancarlo Genta