ADAS systems using advanced technologies in a simulated environment
Politecnico di Torino
The following case study concerns the implementation of a Software-in-the-Loop logic of an autonomous driving maneuver, specifically a Lane-Keeping, in a Matlab/Simulink environment, realized by a real custom vehicle created in VICarRealTime, on two different kinds of realistic scenarios, one urban and one extra-urban, designed using a MSC‘s simulation software called Virtual Test Drive (VTD).
The scenarios reflect in detail the features required in three European projects, the purpose of which is to create virtual platforms that provide highly automated operations for advanced vehicles based on safety and they will be the basic environment on which the Lane-Keeping maneuver will be introduced.
The creation of basic scenarios is essential for the implementation of control logic for the reproduction of autonomous driving manoeuvres. The choice of landscape features can be a great contribution to deal with situations of real danger, on which are concentrated all the today’s OEMs.
Among the scenarios of interest at European level, two types were chosen to be analysed:
- Urban scenario consisting of a traffic light crossing, a long straight road and a roundabout;


- Extra-urban scenario consisting of six-lane curved road, three for each side with a reduction to four-lane road due to the presence of works in progress.


Through the VTD’s features, the both types of scenarios have been reproduced in a realistic way. Roads were sized following the decree of the Ministry of Infrastructure, road signs were inserted and a realistic surrounding environment was reproduced.
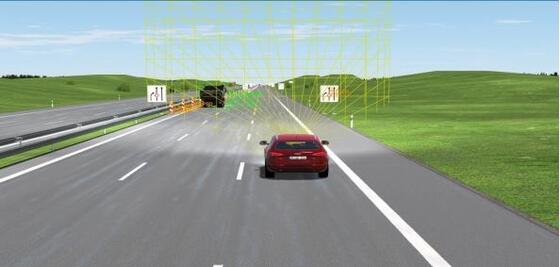
To generate the desired autonomous driving maneuver and introduce it in the created environments, it is important to take as reference vehicle an Ego Car and place the sensors which will be used on the latter.
A “PerfectSensor” was introduced at the rear-view mirror of the Ego Car, both in the urban and in the extra-urban scenarios and it can read information about traffic jam situations, such as other vehicles position, traffic signs and road marks distance, belonging to the visual range of the sensor (yellow cone). These data can be transmitted on the simulation display, in real-time and are used as input in the control logic created in Matlab/Simulink environment for the success of Lane-Keeping manouver.

After that, the control logic for the generation of the target maneuver, the mathematical approach and the parameters to be controlled have been implemented in Matlab/Simulink.
The goal is to ensure that the custom vehicle created in VI-CarRealTime can follow the trajectories created with the help of VTD, with the characteristics listed above.
The relative position of the vehicle to an identified line is described by two quantities:
- lateral deviation, which is the distance between the center of gravity of the vehicle and the target centerline;
- yaw error, which is the angle between the longitudinal axis of the vehicle and the tangent to the centerline;
To keep the vehicle on the desired path and minimize the track errors, it was needed the use of a PID controller calibrated appropriately to minimize the lateral deviation and the yaw error by imposing a steering angle ∂ on the vehicle, to prevent deviation from the target centerline.
The diagram below perfectly describes the loop that must be realized to test the maneuver of Lane-Keeping on a simulation software:
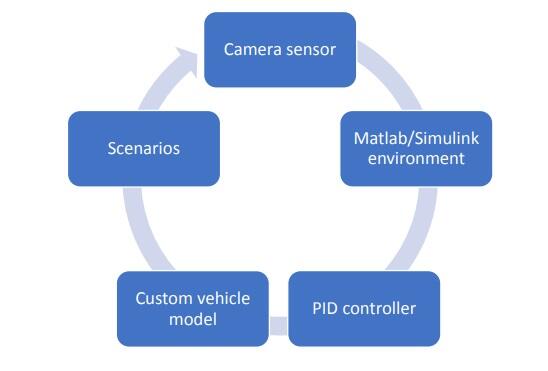
Finally, all the three simulation environments (VTD, CarRealTime and Matlab/Simulink) were connected and comunicated to each other and it was possible to create a serious of videos in which the vehicle generated in CarRealTime is perfectly able to maintain any lane set, both in the urban and extra-urban scenario and to undertake both the traffic light intersection and the urban roundabout, even varying the speed levels, thanks to the control of logic implemented in Matlab/Simulink environment.
Autore: Valentina Abate
Relatore: Mauro Velardocchia
Tutor aziendale: Giacomo Paolieri, Danisi Engineering
Anno accademico 2020/2021
Politecnico di Torino, Danisi Engineering