Un Manipolatore per Prove Dinamiche in Galleria del Vento con Hardware-In-the-Loop: Sintesi Cinetostatica ed Analisi Dinamica
Politecnico di Milano
I robot a cinematica parallela trovano un più largo impiego rispetto a quelli a cinematica seriale in quelle applicazioni in cui il volume di lavoro è limitato rispetto alle dimensioni totali della macchina, ma dove la precisione richiesta è elevata. Infatti, dato che gli errori non si sommano in serie, le catene cinematiche chiuse hanno l'effetto positivo di ridurre la sensibilità complessiva del posizionamento dell'end-effector alle varie fonti di errore. La precisione dipende da diversi fattori, tra cui la flessibilità dei componenti gioca un ruolo fondamentale.
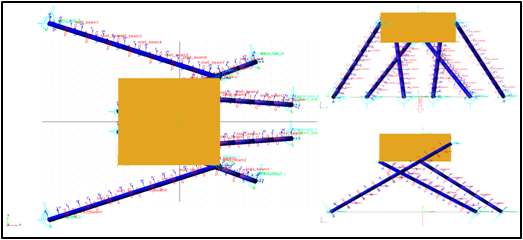
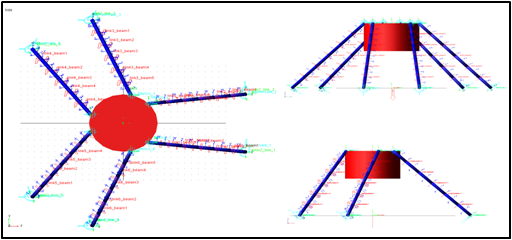
Al fine di eseguire delle prove di tipo dinamico per simulare l’interazione mare-struttura-vento con Hardware-in-The-Loop su componenti nautici in Galleria del Vento, utilizzando un robot parallelo come emulatore del moto flottante del mare, due diverse tipologie di architettura a cinematica parallela sono state prese in considerazione ed ottimizzate, l'Hexaslide e l'Hexaglide. Entrambe le macchine sono costituite da sei link di lunghezza fissa che connettono una piattaforma mobile a sei guide lineari differenti. In questo modo si vengono a creare sei catene cinematiche indipendenti di tipo PUS date dalla serie di un giunto Prismatico attuato, un giusto Universale, e un giunto Sferico.
Per l'applicazione in esame è risultato necessario investigare, con l'ausilio di un modello ADAMS, il contributo dato dai sistemi di trasmissione lineare, a cinghia e a vite a ricircolo di sfere, alla flessibilità complessiva di entrambe le macchine. La prima frequenza propria del sistema è stata mappata in maniera sistematica su tutto lo spazio di lavoro, utilizzando una griglia discreta di punti. Sia per la fase di modellazione che per quella di analisi sono stati utilizzati dei marker di riferimento. In particolare i più importanti sono stati l'Origine e il Tool Center Point (TCP), che rappresentano rispettivamente il sistema di riferimento fisso e di quello mobile. Tutti gli altri marker utilizzati per la creazione di corpi, vincoli e forze, sono stati parametrizzati in maniera tale che cambiando le coordinate del TCP ciascun elemento del manipolatore si ridisponesse nella nuova configurazione. E' ragionevole assumere che il primo modo di vibrare del robot coinvolga la rigidezza flessionale dei link a causa della loro conformazione. Dato che i link si presentano come travi snelle, sono stati modellati come elementi beam discreti. Questo tipo di elementi è costituito da un insieme di segmenti rigidi connessi tra loro attraverso dei campi di forza, ciascuno dei quali utilizzato per simulare le rigidezze flessionali, torsionale ed assiale di una trave. Ogni segmento è stato schematizzato come un cilindro cavo. In fase di modellazione la piattaforma è stata considerata come un unico corpo rigido. Infatti l'idea è stata quella di avere una piattaforma finale costituita da un set di piastre di alluminio con opportune nervature atte a contrastare l'inflessione delle piastre, in modo tale da avere una struttura che risultasse allo stesso tempo rigida e leggera. Per quanto riguarda l'inerzia, per la piattaforma è stata considerata una massa complessiva di 50 kg. I sei gradi di libertà della piattaforma mobile vengono realizzati tramite l'attuazione di altrettante unità di trasmissione lineare solidali con la base. Queste unità di trasmissione lineare sono integrate con il robot.

Le unità di trasmissione a cinghia sono costituite da una fascia di poliuretano avvolta attorno a due pulegge, una delle quali è quella motorizzata. Gli slider sono connessi a questa fascia e contemporaneamente ad una serie di pattini, che hanno il compito di scaricare a terra i momenti e le componenti di forza nel piano trasversale all'asse delle guide. Dato che la cinghia è sottile e la sua densità è relativamente bassa, il suo contributo inerziale è stato trascurato, così come quello delle pulegge, in quanto durante le analisi si è supposto che il motore fosse bloccato. A valle di queste considerazioni, le unità di trasmissione a cinghia sono state modellate come delle forze elastiche con una rigidezza variabile in funzione della posa del robot.
Per quanto riguarda le unità di trasmissione a vite a ricircolo di sfere queste sono state trattate come delle travi di sezione cilindrica lunghe come l'escursione degli slider. A differenza di quanto fatto per le unità di trasmissione cinghia, in questo caso l'inerzia della vite non può essere trascurata in quanto essa è costituita da un cilindro di acciaio, a sezione piena, rotante a velocità molto elevate attorno al proprio asse. Anche in questo caso la vite è stata trattata come un elemento flessibile discreto. Una delle sue estremità è stata vincolata con un giunto cilindrico in modo da lasciare libera la rotazione attorno all'asse della vite; l'estremità in corrispondenza del motore invece è stata vincolata con un incastro poiché, come detto in precedenza per le cinghie, le analisi sono state eseguite a motore bloccato. Riprodurre l'accoppiamento vite-madrevite non è banale dal momento che uno dei due corpi tra cui è applicato il vincolo cambia al variare della posa del robot: il segmento di vite a cui è applicato tale vincolo cambia al variare della posizione dello slider lungo la guida. In definitiva, gli spostamenti dello slider sono contrastati da una forza-coppia elastica che è direttamente proporzionale alla rigidezza torsionale della vite.
Tutte le analisi sono state condotte imponendo condizioni nulle di velocità ed accelerazione sia per gli slider che per la piattaforma. Per ciascuna posa del robot (posizione del TCP e orientazione della piattaforma mobile), in cui è stato discretizzato lo spazio di lavoro, ADAMS ha trovato la posizione di equilibrio e ha linearizzato il sistema attorno ad essa. A questo punto, sono stati calcolati gli autovalori e soltanto il primo di essi è stato salvato in un file di tipo .txt. Infine, tale file è stato utilizzato per generare un set di mappe rappresentanti la variazione della prima frequenza propria su vari piani in cui è stato sezionato lo spazio di lavoro, al variare del tipo di trasmissione lineare (a cinghia o a vite) e del tipo di architettura cinematica del robot.
Tesi di Laurea Magistrale di: Enrico Fiore
Relatori: Ing. Davide Ferrari, Prof. Hermes Giberti
Politecnico di Milano, 3/10/2014
http://hdl.handle.net/10589/96085