Sviluppo e Controllo di un Robot Ridondante Bio-Inspired per la Distribuzione del Calcestruzzo
Politecnico di Milano
L'adattabilità dei robot ridondanti flessibili a numerose applicazioni in ambiti differenti ha reso questo tipo di manipolatori oggetto di una ricerca crescente negli ultimi anni
Si è inteso applicare questa tecnologia ad una problematica molto diffusa relativa ai tubi per la distribuzione del calcestruzzo, che avviene attraverso un grosso braccio meccanico utile per movimentare un tubo di gomma rinforzata, il quale a sua volta veicola il calcestruzzo dalla pompa all'obiettivo finale.
La movimentazione del braccio è comandata dagli operatori attraverso degli attuatori idraulici; il tubo è attaccato al braccio per 3/4 della sua lunghezza totale, mentre la parte restante (3-4 metri) è lasciata spiovente ed è necessario l'intervento degli addetti ai lavori per spostarla manualmente e riuscire a ricoprire di calcestruzzo l'area sottostante. Il tubo da cui esce il getto, a causa delle vibrazioni della parte terminale, potrebbe provocare fuoriuscite di calcestruzzo non uniformi, con il rischio di colpire gli operatori ponendoli in una situazione pericolosa per la loro incolumità.
E’ stato quindi realizzato un robot flessibile, attraverso il quale far passare il tubo di gomma, che sia controllato in modo da poter inseguire il target autonomamente.
Il metodo di attuazione utilizzato è quello con cavi: in tutto il manipolatore è composto da 12 cavi, divisi in 3 set, messi in tensione da servomotori elettrici disposti a monte del robot. Il prototipo che è stato realizzato è in scala 1:5 con una lunghezza di 810 mm e con un diametro interno in cui far passare il tubo di 30 mm.
Le parti create in SOLIDWORKS sono state prima importate in ADAMS e poi assemblate in modo da avere il robot in posizione verticale. I perni sono stati modellati come giunti rotazionali e si sono applicate delle molle torsionali per modellare la rigidezza della giunzione. In seguito, per evitare compenetrazioni dovute ad angoli relativi troppo elevati, sono stati inseriti i vincoli di contatto fra i link.
La parte più importante del modello è senz'altro la costruzione dei cavi, la modellazione dei quali si può effettuare in vari modi in ADAMS; ci si è concentrati su 2 tipi di modellazione, valutandone i pro e i contro: la modellazione con collegamenti flessibili, in cui sono presenti i cavi fisici modellati come discrete flexible links con collegamenti di tipo bushing, e la modellazione diretta delle forze, in cui non sono presenti i cavi fisici ma sono inserite direttamente le forze che si scambiano cavi e link. Attraverso le simulazioni ADAMS sono state validate le 2 modellazioni dei cavi, valutando anche l’incidenza di contributi minori come ad esempio il peso dei cavi.

Figura 1: (a) Modellazione con collegamenti flessibili (b) Modellazione diretta delle forze
L’algoritmo di controllo implementato è composto da 4 blocchi (Figura 2). Il blocco di cinematica inversa è critico in quanto il manipolatore presenta una doppia difficoltà: ridondanza cinematica e sottoattuazione. La mappatura dei cavi serve per risalire alla traslazione dei cavi a partire dalla rotazione dei link. Il controllore è un PID in cui si retroaziona la traslazione dei cavi.

Figura 2
Le simulazioni dinamiche sono state effettuate in ADAMS per testare l’algoritmo di controllo e misurare le forze in gioco massime per il successivo dimensionamento dei servomotori.
In Figura 3a si può osservare il confronto fra la traiettoria imposta (target) e quella realmente effettuata dall’end-effector durante una simulazione dinamica che prevede il passaggio attraverso 3 punti di equilibrio del piano X-Z. In Figura 3b è rappresentato il tipo di deformata che il robot assumerà per l’applicazione specifica della distribuzione del calcestruzzo.
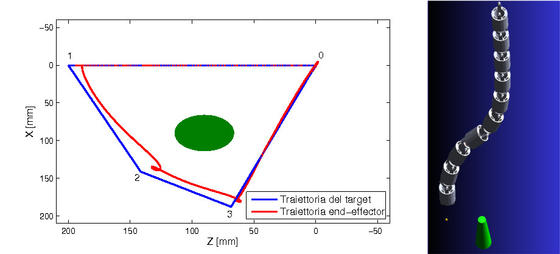
Figura 3: (a) Confronto fra traiettoria del target e dell’end-effector (b) Simulazione dinamica
Tesi di Laurea Magistrale di: Gianmarco Errico
Relatore: Ferruccio Resta
Correlatore: Francesco Ripamonti