Caratterizzazione sperimentale di ruote elastiche per rover planetari
Politecnico di Torino – Dipartimento di Ingegneria Meccanica e Aerospaziale
Si prevede che molti dei dispositivi automatici (rover) e dei veicoli per il trasporto degli astronauti che verranno impiegati nelle future missioni spaziali di esplorazione lunare e planetaria saranno dotati di ruote.
Poiché le ruote pneumatiche usate nel settore automotive non sono adatte alle estreme condizioni degli ambienti non terrestri, si rivelano fondamentali la progettazione e lo sviluppo di ruote in grado di resistere, ad esempio, agli alti livelli di radiazioni ultraviolette e ionizzanti, alle temperature estreme e all’assenza di atmosfera.
Molti dei rover per l’esplorazione planetaria costruiti nel passato erano costituiti da ruote rigide solitamente realizzate in materiale metallico.
Nel presente lavoro l’attenzione si focalizza sulla caratterizzazione sperimentale delle ruote elastiche del dimostratore terrestre del rover per l’esplorazione lunare e marziana sviluppato dal Team DIANA, gruppo studentesco di robotica spaziale del Politecnico di Torino.
In estrema sintesi, la suddetta attività consiste nel calcolo della forza laterale, della resistenza al rotolamento e del momento di autoallineamento in funzione di differenti parametri quali, ad esempio, il sideslip angle, il camber angle, il precarico applicato alla ruota e la velocità di quest’ultima.
Lo studio dell’interazione tra la ruota e il terreno in differenti condizioni operative è essenziale per evitare l’insorgere di fenomeni che potrebbero ostacolare il successo della missione: perdita di trazione, slittamento e ribaltamento del veicolo.
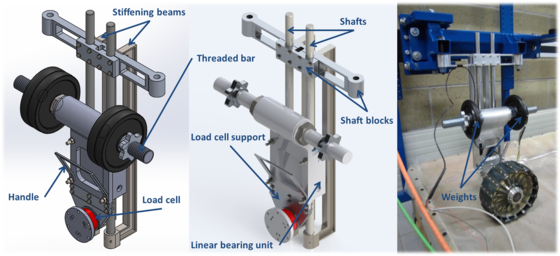
Il banco di prova utilizzato per la caratterizzazione sperimentale della ruota elastica è essenzialmente costituito dai seguenti sottosistemi: una guida lineare azionata da un servomotore accoppiato a un riduttore, una struttura di supporto e di contenimento della regolite artificiale e da un braccio meccanico collegato a un’estremità alla guida lineare e all’altra alla cella di carico e alla ruota.
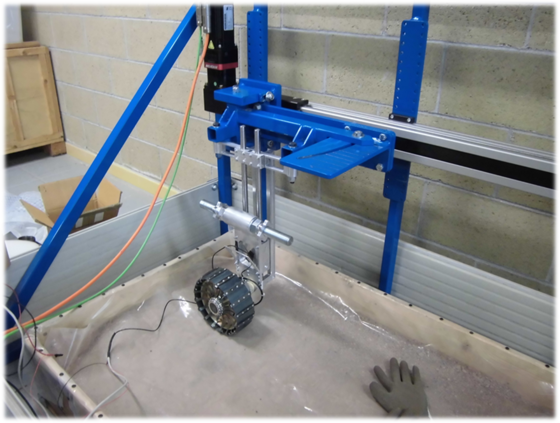
Il braccio è costituito da un gruppo di guida assiale a quattro cuscinetti a sfere per movimenti lineari. Il precarico è impostato semplicemente utilizzando delle masse in ghisa per bilanciere. La struttura è stata progettata nell’ottica di realizzare uno strumento a basso costo e semplice da utilizzare. Le deformazioni e le tensioni, indotte dalle forze sviluppate dall’interazione tra la ruota e il terreno all’interno dei componenti costituenti il braccio, sono state analizzate mediante il solver NASTRAN. La mesh, i materiali e le proprietà geometriche dei componenti sono state impostate tramite il pre/post-processor PATRAN. Le parti meccaniche sono state disegnate con il software SOLIDWORKS e, alcune di queste, sono state importate in PATRAN dopo un’attenta operazione di defeaturing. Per il sistema costituito dall’albero in acciaio e dalla trave di irrigidimento in lega di alluminio con sezione a doppia T si è preferito ricostruire una geometria semplificata e di discretizzarla mediante elementi BAR.
I dati sperimentali sono stati elaborati in ambiente MATLAB.
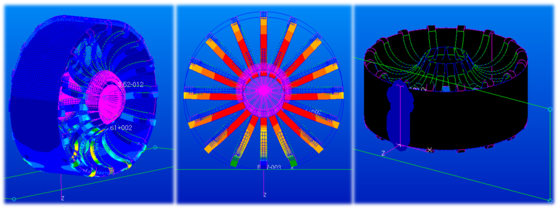
La ruota elastica è costituita da un battistrada, da sedici molle e altrettanti grouser realizzati in acciaio armonico. Nel mozzo della ruota è installato un motore elettrico brushless a rotore esterno. Il motore è retroazionato mediante un sensore ottico montato su un PCB custom accoppiato a un disco ottico. I test sono stati eseguiti con motore non alimentato.
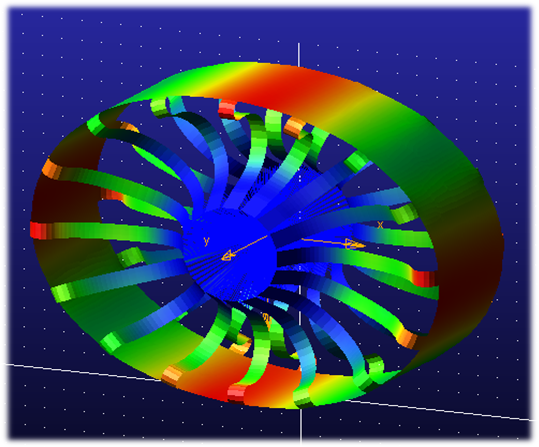
All’interno di questa attività di tesi è stato anche realizzato il modello flessibile della ruota, utilizzando i software NASTRAN (generazione del file MNF) e ADAMS, da importare nel modello dinamico del rover per migliorare la simulazione dell’interazione tra la ruota e il suolo.
Infine, è stata eseguita un’analisi non-lineare statica della ruota elastica, sfruttando il solver NASTRAN, con lo scopo di studiare le potenzialità della SOL 400 per lo studio dell’interazione tra il suolo e il terreno.
Tesi di Laurea Magistrale di: Cristiano Pizzamiglio
Relatori: Prof. Giancarlo Genta, Ing. Fabrizio Impinna